
HW 4¶
ISE-530 Homework IV: from Cottle-Thapa. Due Monday 11:59 PM October 12, 2020
Exercise 9.4, 9.20, 9.21, 9.22, and 10.5
Show that the univariate function \(f(x) = x^{4/3}\) has a unique minimizer at \(x = 0\) but that for any nonzero initial point, the Newton sequence for minimizing \(f\) diverges.
Compute the first two iterates of the Newton Method (with unit step) starting with \(x^0 = (0, 0)\) for minimizing the function: \(f(x_1, x_2) = 2x^4_1 + x^2_2 − 4x_1x_2 + 5x_2\). Do the same with the steepest descent method with exact line search.
Compute and solve the equation of the linear regression line corresponding to the univariate input-output data \((x, y)\) given by \(\{(−2, 12),(−1, 11),(0, 8),(1, 5),(2, 2),(3, −3)\}\). Plot these points and the computed line in the \((x, y)\)-plane.
Suppose that the (univariate) variable y is known to be a quadratic function of the variable \(x\); that is,
where the coefficients \(a, b, c\) are obtained by conducting an experiment in which values \(y_1, \cdots, y_n\) of the variable \(y\) are measured for corresponding values \(x_1, \cdots, x_n\) of the variable \(x\). Find the best least-squares fit of the quadratic polynomial using the data:
Plot these points and the computed quadratic curve in the \((x, y)\)-plane.
Show that the matrix
is positive semidefinite but not positive definite for all values of the scalar \(x\).
%load_ext autotime
%load_ext nb_black
%matplotlib inline
import matplotlib.pyplot as plt
from mpl_toolkits.mplot3d import Axes3D
plt.rcParams["figure.dpi"] = 300
plt.rcParams["figure.figsize"] = (16, 12)
import pandas as pd
import numpy as np
import cvxpy as cp
import scipy as sp
from scipy import optimize
import functools
Chapter 9¶
9.4¶
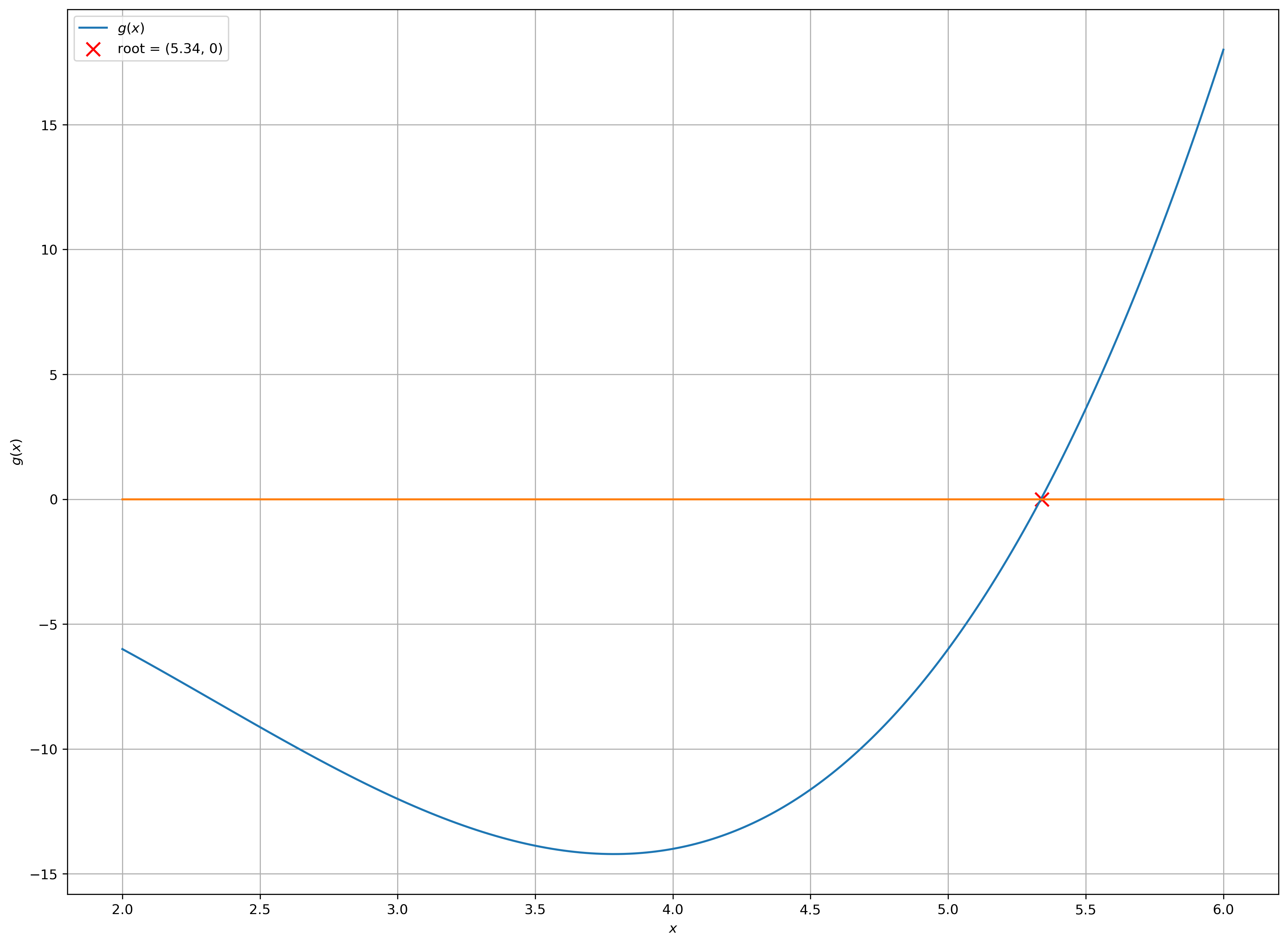
Apply, in turn, the Bisection Method, Newton’s Method, the Secant Method, and the Regula Falsi Method to find a zero of the polynomial \(g(x) = x^3 − 7x^2 + 10x − 6\) over the interval \([2, 6]\).
g = lambda x: x ** 3 - 7 * x ** 2 + 10 * x - 6
g_prime = lambda x: 3 * (x ** 2) - 14 * x + 10 # Derivative of g
quadratic_formula = lambda a, b, c: (
(-b + (b ** 2 - 4 * a * c) ** 0.5) / (2 * a),
(-b - (b ** 2 - 4 * a * c) ** 0.5) / (2 * a),
)
time: 1.26 ms
Bisection Method¶
def bisection_root_finding(f, interval=[2, 6], δ=1e-05):
assert (len(interval) == 2) & (
interval[1] > interval[0]
), "interval must only have 2 values and b > a."
root_candidate = np.mean(interval)
while True:
# 1. If |b−a| ≤ δ or f(c)=0, stop and report the zero as x∗=c.
if np.allclose(np.abs(interval[1] - interval[0]), 0, rtol=δ) or np.allclose(
f(root_candidate), 0, rtol=1e-5
):
return root_candidate
# 2. If f(a)f(c)>0, let a←c else let b←c to create a new interval.
print(
f"x = ({np.round(interval, 5)}/2) = {np.round(root_candidate, 5)}",
f"g(x) = {np.round(f(root_candidate), 5)}",
)
if np.prod(np.sign([f(root_candidate), f(interval[1])])) < 0:
interval = [root_candidate, interval[1]]
else:
interval = [interval[0], root_candidate]
# 3. Find the midpoint c of the new interval and evaluate f(c).
root_candidate = np.mean(interval)
return root_candidate
time: 2.25 ms
bisection_root_finding(f=g, interval=[2, 6])
x = ([2 6]/2) = 4.0 g(x) = -14.0
x = ([4. 6.]/2) = 5.0 g(x) = -6.0
x = ([5. 6.]/2) = 5.5 g(x) = 3.625
x = ([5. 5.5]/2) = 5.25 g(x) = -1.73438
x = ([5.25 5.5 ]/2) = 5.375 g(x) = 0.80273
x = ([5.25 5.375]/2) = 5.3125 g(x) = -0.50073
x = ([5.3125 5.375 ]/2) = 5.34375 g(x) = 0.14218
x = ([5.3125 5.34375]/2) = 5.32812 g(x) = -0.18147
x = ([5.32812 5.34375]/2) = 5.33594 g(x) = -0.02019
x = ([5.33594 5.34375]/2) = 5.33984 g(x) = 0.06086
x = ([5.33594 5.33984]/2) = 5.33789 g(x) = 0.0203
x = ([5.33594 5.33789]/2) = 5.33691 g(x) = 4e-05
x = ([5.33594 5.33691]/2) = 5.33643 g(x) = -0.01008
x = ([5.33643 5.33691]/2) = 5.33667 g(x) = -0.00502
x = ([5.33667 5.33691]/2) = 5.33679 g(x) = -0.00249
x = ([5.33679 5.33691]/2) = 5.33685 g(x) = -0.00122
x = ([5.33685 5.33691]/2) = 5.33688 g(x) = -0.00059
x = ([5.33688 5.33691]/2) = 5.3369 g(x) = -0.00027
x = ([5.3369 5.33691]/2) = 5.33691 g(x) = -0.00012
x = ([5.33691 5.33691]/2) = 5.33691 g(x) = -4e-05
x = ([5.33691 5.33691]/2) = 5.33691 g(x) = 0.0
x = ([5.33691 5.33691]/2) = 5.33691 g(x) = -2e-05
x = ([5.33691 5.33691]/2) = 5.33691 g(x) = -1e-05
x = ([5.33691 5.33691]/2) = 5.33691 g(x) = -0.0
x = ([5.33691 5.33691]/2) = 5.33691 g(x) = 0.0
x = ([5.33691 5.33691]/2) = 5.33691 g(x) = -0.0
x = ([5.33691 5.33691]/2) = 5.33691 g(x) = 0.0
x = ([5.33691 5.33691]/2) = 5.33691 g(x) = 0.0
5.3369119837880135
time: 14.4 ms
Newton’s Method¶
def newton_raphson_root_finding(f, f_prime, x_0, δ=1e-05):
x_k = x_0 # x_k
while True:
print(f"New root candidate: {x_k}")
# 1. If |f(xk)| ≤ δ, stop and report a zero of f as x∗ = xk.
if np.allclose(f(x_k), 0, rtol=δ):
return x_k
# 2. Determine pk = −f(xk)/f′(xk)
p_k = -f(x_k) / f_prime(x_k)
# 3. Set the steplength αk = 1.
α_k = 1
# 4. Let xk+1 = xk + αkpk = xk − f(xk)/f′(xk), and compute f(xk+1).
x_k += α_k * p_k
# 5. Let k←k+1 and return to Step 1.
return x_k
time: 1.18 ms
newton_raphson_root_finding(f=g, f_prime=g_prime, x_0=6)
New root candidate: 6
New root candidate: 5.470588235294118
New root candidate: 5.3440601662117935
New root candidate: 5.336934090072915
New root candidate: 5.336911983591771
5.336911983591771
time: 3.14 ms
Secant Method¶
def secant_root_finding(f, x_0, x_1, δ=1e-05):
x_k, x_k_1 = x_1, x_0 # x_k, x_k-1
while True:
print(f"New root candidate: {x_k}")
# 1. If |f(xk)| ≤ δ, stop and report a zero of f as x∗ = xk.
if np.allclose(f(x_k), 0, rtol=δ):
return x_k
# 2. Determine pk = −f(xk) [(xk − xk−1) / (f(xk) − f(xk−1))].
p_k = -f(x_k) * ((x_k - x_k_1) / (f(x_k) - f(x_k_1)))
# 3. Set the steplength αk = 1.
α_k = 1
# 4. Let xk+1 = xk +αkpk = xk −f(xk) [(xk − xk−1) / (f(xk) − f(xk−1))], and compute f(xk+1).
x_k_1 = x_k
x_k += α_k * p_k
# 5. Let k←k+1 and return to Step 1.
return x_k
time: 1.48 ms
secant_root_finding(f=g, x_0=8, x_1=7)
New root candidate: 7
New root candidate: 6.135135135135135
New root candidate: 5.656587804167496
New root candidate: 5.418190380860478
New root candidate: 5.346901914851419
New root candidate: 5.337254755192322
New root candidate: 5.3369134667667195
New root candidate: 5.336911983600337
5.336911983600337
time: 3.31 ms
Regula Falsi Method¶
def regula_falsi_root_finding(f, x_0, x_1, δ=1e-05):
assert (
f(x_0) * f(x_1) < 0
), "f(x_0)f(x_1) < 0, choose another pair of values for x_0 and x_1."
x_k, x_k_1 = x_1, x_0 # x_k, x_k-1
while True:
print(f"New root candidate: {x_k}")
# 1. If |f(xk)| ≤ δ, stop and report a zero of f as x∗ = xk.
if np.allclose(f(x_k), 0, rtol=δ):
return x_k
# 2. Determine pk = −f(xk) [(xk − xk−1) / (f(xk) − f(xk−1))].
p_k = -f(x_k) * ((x_k - x_k_1) / (f(x_k) - f(x_k_1)))
# 3. Set the steplength αk = 1.
α_k = 1
# 5. If f(xk+1)f(xk−1) < 0, set xk = xk−1.
if f(x_k + α_k * p_k) * f(x_k_1) < 0:
x_k_1 = x_k
# 4. Let xk+1 = xk +αkpk = xk −f(xk) [(xk − xk−1) / (f(xk) − f(xk−1))], and compute f(xk+1).
x_k += α_k * p_k
# 6. Let k←k+1 and return to Step 1.
return x_k
time: 1.7 ms
regula_falsi_root_finding(f=g, x_0=5, x_1=7)
New root candidate: 7
New root candidate: 5.171428571428572
New root candidate: 5.365835448708374
New root candidate: 5.334736464207193
New root candidate: 5.337077382052705
New root candidate: 5.336911826879108
New root candidate: 5.3369119835274486
5.3369119835274486
time: 3.03 ms
x = np.linspace(2, 6, int(1e3))
plt.plot(x, g(x), label="$g(x)$")
plt.plot(x, np.zeros(x.shape))
plt.scatter(5.34, 0, c="r", marker="x", s=100, label="root = (5.34, 0)")
plt.ylabel("$g(x)$")
plt.xlabel("$x$")
plt.legend()
plt.grid(True)
plt.show()
time: 1.92 s
9.20¶
Consider the function
with \(a > 0\) and \(b < 0\).
(a) Show that \(f(x_1, x_2)\) has only one stationary point.
Gradient Vector:
First-order Stationarity condition:
Hence, for fixed constants \(a, b, c, d\), there is only one stationary point given by the formula above. \(\blacksquare\)
(b) Show that this stationary point is neither a minimizer nor maximizer for \(f\).
Hessian Matrix:
As observed, since \(a > 0, b < 0\), the Hessian has 1 positive eigenvalue \(2a\), and 1 negative eigenvalue \(2b\), meaning that it is neither positive semi-definite (all eigenvalues >= 0), nor positive definite (all eigenvalues > 0), nor negative definite (all eigenvalues < 0), nor negative semi-definite (all eigenvalues <= 0), and is classified as indefinite and is a saddle point, neither a minimizer or maximizer for \(f\). \(\blacksquare\)
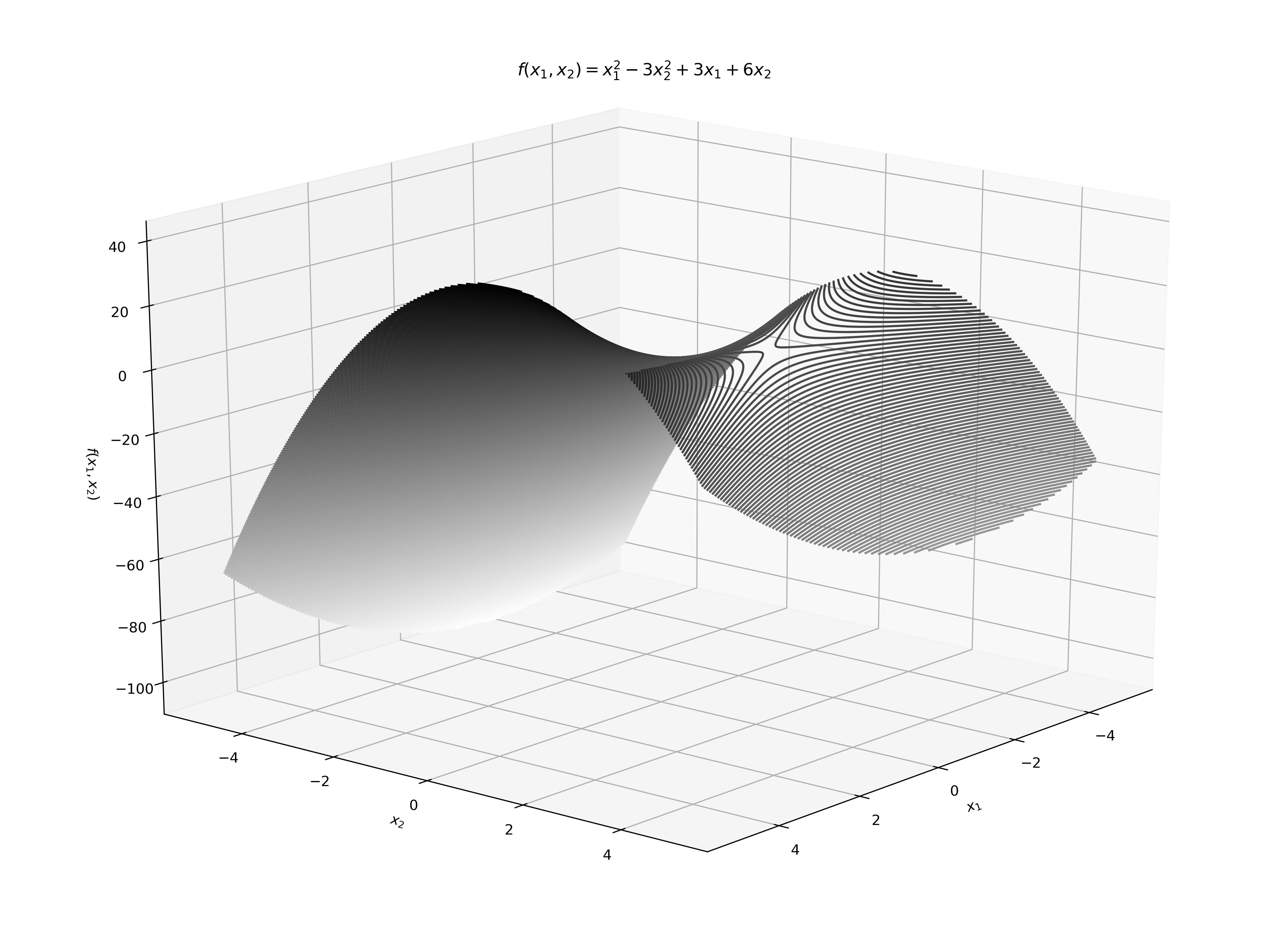
(c) With \(a=1,b=−3,c=3,d=6\),draw a few contour lines of \(f\).
f = (
lambda x, a=1, b=-3, c=3, d=6: a * (x[0] ** 2)
+ b * (x[1] ** 2)
+ c * x[0]
+ d * x[1]
)
x_1, x_2 = np.linspace(-5, 5, 1000), np.linspace(-5, 5, 1000)
X, Y = np.meshgrid(x_1, x_2)
Z = f(x=[X, Y])
ax = plt.axes(projection="3d")
ax.view_init(20, 40)
ax.contour3D(X, Y, Z, 200, cmap="binary")
ax.set_xlabel("$x_1$")
ax.set_ylabel("$x_2$")
ax.set_zlabel("$f(x_1, x_2)$")
plt.title("$f(x_1, x_2) = x^2_1 -3x^2_2 + 3x_1 + 6x_2$")
plt.show()
time: 6.08 s
9.21¶
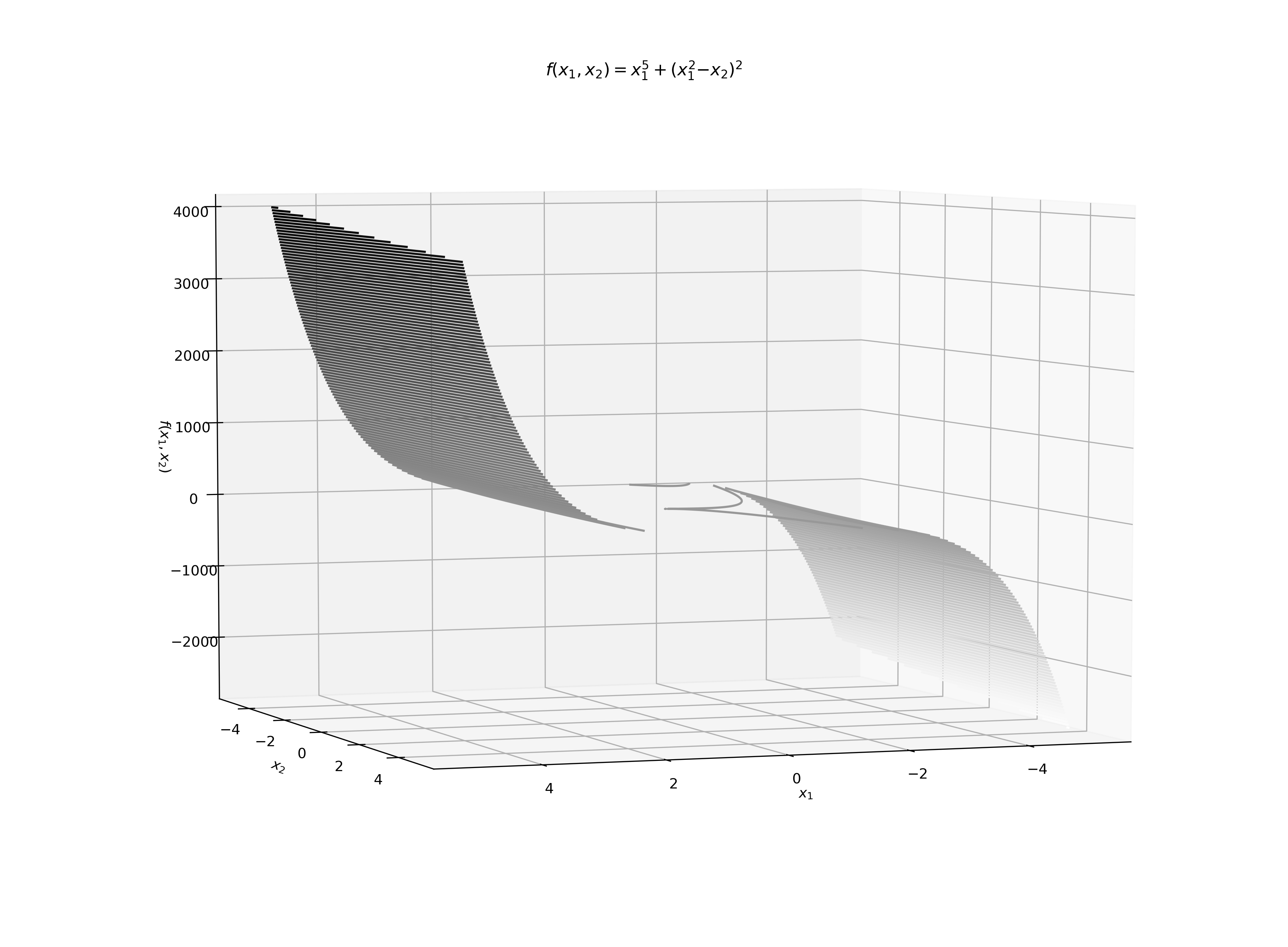
(Based on Exercise 4 in Fletcher [68, p. 30].) The function \(f(x_1, x_2) = x^5_1 +(x^2_1 − x_2)^2\) has only one stationary point (i.e., solution of \(\nabla f(x_1, x_2) = 0\)). Find it and show that it is neither a local maximizer nor a local minimizer.
Gradient Vector:
First-order Stationarity condition:
Hessian Matrix:
At the stationary point:
We have a positive semi-definite Hessian, which although satisfies the second order necessary conditions for optimality, it does not the sufficiency conditions for optimality (Hessian needs to be positive definite, not just positive semi-definite), which does means it is not a local minimizer.
However, at the stationary point, \(f(x_1=0, x_2=0) = 0\) and \(f(x_1>0, x_2>0) > 0\) while \(f(x_1<0, x_2<0) < 0\), meaning that it is neither a local minimizer or maximizer at the stationary point. \(\blacksquare\)
Coercivity: We also see that \(x^5_1\) term dominates in \(f\) at the extreme points of the function. As (\(x_1 \rightarrow \infty / -\infty\) and \(x_2 \rightarrow \infty / -\infty\)), \(x^5_1\) term dominates and if \(x_1 \rightarrow \infty\), \(f \rightarrow \infty\) and if \(x_1 \rightarrow -\infty\), \(f \rightarrow -\infty\).
f = lambda x: x[0] ** 5 + (x[0] ** 2 - x[1]) ** 2
x_1, x_2 = np.linspace(-5, 5, 1000), np.linspace(-5, 5, 1000)
X, Y = np.meshgrid(x_1, x_2)
Z = f(x=[X, Y])
ax = plt.axes(projection="3d")
ax.view_init(5, 70)
ax.contour3D(X, Y, Z, 200, cmap="binary")
ax.set_xlabel("$x_1$")
ax.set_ylabel("$x_2$")
ax.set_zlabel("$f(x_1, x_2)$")
plt.title("$f(x_1, x_2) = x^5_1 +(x^2_1 − x_2)^2$")
plt.show()
time: 5.31 s
9.22¶
Find a global minimum of the function
Gradient Vector:
First-order Stationarity condition:
Hessian Matrix:
np.linalg.eigvals(np.array([[12, 2, 2], [2, 8, 2], [2, 2, 4]]))
array([13.55691424, 7.42166291, 3.02142286])
time: 3.95 ms
Since all the eigenvalues \(\lambda\) of the Hessian matrix are positive, regardless of which point \(x_1, x_2, x_3\), we have a positive definite Hessian and hence, strictly convex with 1 global minimum (ordinarily, if the Hessian is just positive definite at that point thenit’ll just be a strict local minimizer), which is the single stationary point we found.
f = (
lambda x: 6 * (x[0] ** 2)
+ 4 * (x[1] ** 2)
+ 2 * (x[2] ** 2)
+ 2 * x[0] * x[1]
+ 2 * x[0] * x[2]
+ 2 * x[1] * x[2]
- 11 * x[0]
- 12 * x[1]
- 9 * x[2]
)
optimize.minimize(fun=f, x0=np.zeros((3,)))
fun: -15.499999999996737
hess_inv: array([[ 0.0921055 , -0.01317824, -0.03944193],
[-0.01317824, 0.14513135, -0.06639581],
[-0.03944193, -0.06639581, 0.30356681]])
jac: array([ 1.43051147e-06, -3.81469727e-06, 3.09944153e-06])
message: 'Optimization terminated successfully.'
nfev: 40
nit: 8
njev: 10
status: 0
success: True
x: array([0.50000005, 0.99999923, 1.50000113])
time: 8.72 ms
Global minimum: -15.5
Chapter 10¶
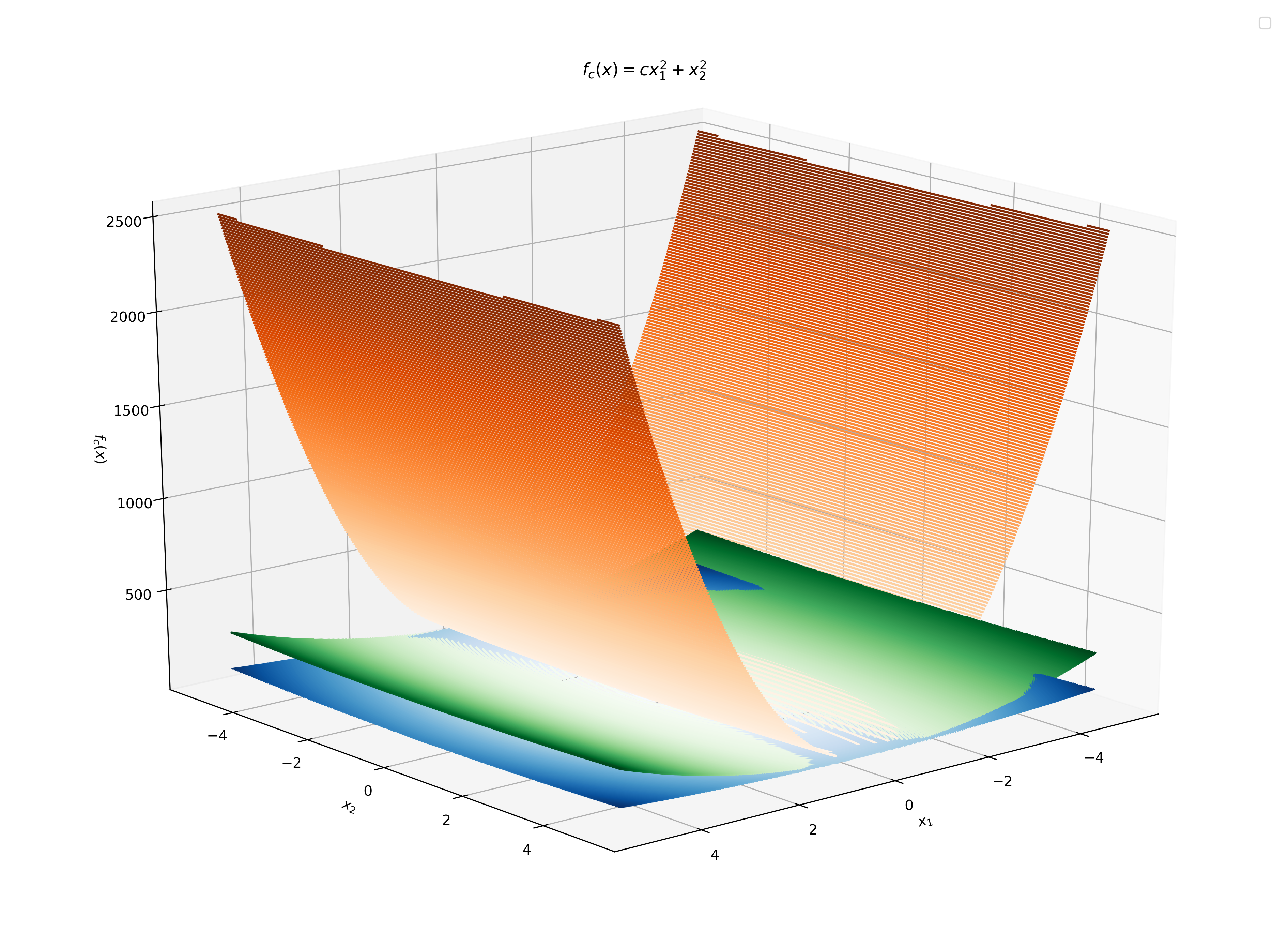
10.5¶
Define the function
f = lambda x, c: c * x[0] ** 2 + x[1] ** 2
f_prime = lambda x, c: np.array([2 * c * x[0], 2 * x[1]])
hessian = lambda x, c: np.array([[2 * c, 0], [0, 2]])
c_vals = [2, 10, 100]
x_1, x_2 = np.linspace(-5, 5, 1000), np.linspace(-5, 5, 1000)
X, Y = np.meshgrid(x_1, x_2)
Z = {c: f(x=[X, Y], c=c) for c in c_vals}
ax = plt.axes(projection="3d")
ax.view_init(20, 50)
for c, cmap in zip(c_vals, ["Blues", "Greens", "Oranges"]):
ax.contour3D(X, Y, Z[c], 200, cmap=cmap, label=f"$f_{c}(x) = {c}x^2_1 + x^2_2$")
ax.legend()
ax.set_xlabel("$x_1$")
ax.set_ylabel("$x_2$")
ax.set_zlabel("$f_c(x)$")
plt.title("$f_c(x) = cx^2_1 + x^2_2$")
plt.show()
/opt/anaconda3/envs/ml/lib/python3.7/site-packages/ipykernel_launcher.py:12: UserWarning: The following kwargs were not used by contour: 'label'
if sys.path[0] == '':
No handles with labels found to put in legend.
time: 17 s
(a) Starting with the point \(x = (10, 10)^\top\) , carry out three iterations of the Steepest-descent Method to minimize \(f_c(x)\) when \(c = 2, c = 10,\) and \(c = 100\).
def simple_steplength(f, f_prime, x_k, p_k, μ=1e-4):
# 1. Set α=1.
α = 1
while True:
# 2. If f(xk+αpk) ≤ f(xk)+μαgkpk, set αk=α and stop.
if f(x_k + α * p_k) <= f(x_k) + μ * α * f_prime(x_k).T @ p_k:
return α
else:
# 3. Set α=α/2 and go to Step2.
α /= 2
def steepest_descent(f, f_prime, x_0, ε=1e-15, steplength_algo=simple_steplength):
k, x_k = 0, x_0
while True:
# 1. Test for Convergence
if np.allclose(f_prime(x_k), 0, rtol=ε):
return x_k
# 2. Compute a search direction
p_k = -f_prime(x_k)
# 3. Compute a steplength
α_k = steplength_algo(f=f, f_prime=f_prime, x_k=x_k, p_k=p_k, μ=1e-4)
print(
f"Iteration: {k} - x_{k} = {np.round(x_k, 5)}, p_k = {np.round(p_k, 5)}, α_k = {np.round(α_k, 5)}"
)
# 4. Update the iterate and return to Step 1
k += 1
x_k += α_k * p_k
# Check for divergence
if np.allclose(x_k, x_k + α_k * p_k) and k > 1:
print("Series diverged.")
break
time: 2.47 ms
c = 2
print(f"Steepest Descent with c={c}:")
print("=" * 30)
steepest_descent(
f=functools.partial(f, c=c),
f_prime=functools.partial(f_prime, c=c),
x_0=np.array([10.0, 10.0]),
ε=1e-15,
)
Steepest Descent with c=2:
==============================
Iteration: 0 - x_0 = [10. 10.], p_k = [-40. -20.], α_k = 0.5
Iteration: 1 - x_1 = [-10. 0.], p_k = [40. -0.], α_k = 0.25
array([0., 0.])
time: 4.93 ms
c = 10
print(f"Steepest Descent with c={c}:")
print("=" * 30)
steepest_descent(
f=functools.partial(f, c=c),
f_prime=functools.partial(f_prime, c=c),
x_0=np.array([10.0, 10.0]),
ε=1e-15,
)
Steepest Descent with c=10:
==============================
Iteration: 0 - x_0 = [10. 10.], p_k = [-200. -20.], α_k = 0.0625
Iteration: 1 - x_1 = [-2.5 8.75], p_k = [ 50. -17.5], α_k = 0.0625
Iteration: 2 - x_2 = [0.625 7.65625], p_k = [-12.5 -15.3125], α_k = 0.125
Iteration: 3 - x_3 = [-0.9375 5.74219], p_k = [ 18.75 -11.48438], α_k = 0.125
Iteration: 4 - x_4 = [1.40625 4.30664], p_k = [-28.125 -8.61328], α_k = 0.0625
Iteration: 5 - x_5 = [-0.35156 3.76831], p_k = [ 7.03125 -7.53662], α_k = 0.125
Iteration: 6 - x_6 = [0.52734 2.82623], p_k = [-10.54688 -5.65247], α_k = 0.125
Iteration: 7 - x_7 = [-0.79102 2.11967], p_k = [15.82031 -4.23935], α_k = 0.0625
Iteration: 8 - x_8 = [0.19775 1.85472], p_k = [-3.95508 -3.70943], α_k = 0.125
Iteration: 9 - x_9 = [-0.29663 1.39104], p_k = [ 5.93262 -2.78207], α_k = 0.0625
Iteration: 10 - x_10 = [0.07416 1.21716], p_k = [-1.48315 -2.43431], α_k = 0.25
Iteration: 11 - x_11 = [-0.29663 0.60858], p_k = [ 5.93262 -1.21716], α_k = 0.0625
Iteration: 12 - x_12 = [0.07416 0.53251], p_k = [-1.48315 -1.06501], α_k = 0.125
Iteration: 13 - x_13 = [-0.11124 0.39938], p_k = [ 2.22473 -0.79876], α_k = 0.0625
Iteration: 14 - x_14 = [0.02781 0.34946], p_k = [-0.55618 -0.69891], α_k = 0.125
Iteration: 15 - x_15 = [-0.04171 0.26209], p_k = [ 0.83427 -0.52419], α_k = 0.125
Iteration: 16 - x_16 = [0.06257 0.19657], p_k = [-1.25141 -0.39314], α_k = 0.0625
Iteration: 17 - x_17 = [-0.01564 0.172 ], p_k = [ 0.31285 -0.344 ], α_k = 0.125
Iteration: 18 - x_18 = [0.02346 0.129 ], p_k = [-0.46928 -0.258 ], α_k = 0.125
Iteration: 19 - x_19 = [-0.0352 0.09675], p_k = [ 0.70392 -0.1935 ], α_k = 0.0625
Iteration: 20 - x_20 = [0.0088 0.08466], p_k = [-0.17598 -0.16931], α_k = 0.125
Iteration: 21 - x_21 = [-0.0132 0.06349], p_k = [ 0.26397 -0.12698], α_k = 0.0625
Iteration: 22 - x_22 = [0.0033 0.05556], p_k = [-0.06599 -0.11111], α_k = 0.25
Iteration: 23 - x_23 = [-0.0132 0.02778], p_k = [ 0.26397 -0.05556], α_k = 0.0625
Iteration: 24 - x_24 = [0.0033 0.02431], p_k = [-0.06599 -0.04861], α_k = 0.125
Iteration: 25 - x_25 = [-0.00495 0.01823], p_k = [ 0.09899 -0.03646], α_k = 0.0625
Iteration: 26 - x_26 = [0.00124 0.01595], p_k = [-0.02475 -0.0319 ], α_k = 0.125
Iteration: 27 - x_27 = [-0.00186 0.01196], p_k = [ 0.03712 -0.02393], α_k = 0.125
Iteration: 28 - x_28 = [0.00278 0.00897], p_k = [-0.05568 -0.01794], α_k = 0.0625
Iteration: 29 - x_29 = [-0.0007 0.00785], p_k = [ 0.01392 -0.0157 ], α_k = 0.125
Iteration: 30 - x_30 = [0.00104 0.00589], p_k = [-0.02088 -0.01178], α_k = 0.125
Iteration: 31 - x_31 = [-0.00157 0.00442], p_k = [ 0.03132 -0.00883], α_k = 0.0625
Iteration: 32 - x_32 = [0.00039 0.00386], p_k = [-0.00783 -0.00773], α_k = 0.125
Iteration: 33 - x_33 = [-0.00059 0.0029 ], p_k = [ 0.01175 -0.0058 ], α_k = 0.0625
Iteration: 34 - x_34 = [0.00015 0.00254], p_k = [-0.00294 -0.00507], α_k = 0.25
Iteration: 35 - x_35 = [-0.00059 0.00127], p_k = [ 0.01175 -0.00254], α_k = 0.0625
Iteration: 36 - x_36 = [0.00015 0.00111], p_k = [-0.00294 -0.00222], α_k = 0.125
Iteration: 37 - x_37 = [-0.00022 0.00083], p_k = [ 0.0044 -0.00166], α_k = 0.0625
Iteration: 38 - x_38 = [6.0e-05 7.3e-04], p_k = [-0.0011 -0.00146], α_k = 0.125
Iteration: 39 - x_39 = [-8.0e-05 5.5e-04], p_k = [ 0.00165 -0.00109], α_k = 0.125
Iteration: 40 - x_40 = [0.00012 0.00041], p_k = [-0.00248 -0.00082], α_k = 0.0625
Iteration: 41 - x_41 = [-3.0e-05 3.6e-04], p_k = [ 0.00062 -0.00072], α_k = 0.125
Iteration: 42 - x_42 = [5.0e-05 2.7e-04], p_k = [-0.00093 -0.00054], α_k = 0.125
Iteration: 43 - x_43 = [-7.e-05 2.e-04], p_k = [ 0.00139 -0.0004 ], α_k = 0.0625
Iteration: 44 - x_44 = [2.0e-05 1.8e-04], p_k = [-0.00035 -0.00035], α_k = 0.125
Iteration: 45 - x_45 = [-3.0e-05 1.3e-04], p_k = [ 0.00052 -0.00026], α_k = 0.0625
Iteration: 46 - x_46 = [1.0e-05 1.2e-04], p_k = [-0.00013 -0.00023], α_k = 0.25
Iteration: 47 - x_47 = [-3.e-05 6.e-05], p_k = [ 0.00052 -0.00012], α_k = 0.0625
Iteration: 48 - x_48 = [1.e-05 5.e-05], p_k = [-0.00013 -0.0001 ], α_k = 0.125
Iteration: 49 - x_49 = [-1.e-05 4.e-05], p_k = [ 2.e-04 -8.e-05], α_k = 0.0625
Iteration: 50 - x_50 = [0.e+00 3.e-05], p_k = [-5.e-05 -7.e-05], α_k = 0.125
Iteration: 51 - x_51 = [-0.e+00 2.e-05], p_k = [ 7.e-05 -5.e-05], α_k = 0.125
Iteration: 52 - x_52 = [1.e-05 2.e-05], p_k = [-1.1e-04 -4.0e-05], α_k = 0.0625
Iteration: 53 - x_53 = [-0.e+00 2.e-05], p_k = [ 3.e-05 -3.e-05], α_k = 0.125
Iteration: 54 - x_54 = [0.e+00 1.e-05], p_k = [-4.e-05 -2.e-05], α_k = 0.125
Iteration: 55 - x_55 = [-0.e+00 1.e-05], p_k = [ 6.e-05 -2.e-05], α_k = 0.0625
Iteration: 56 - x_56 = [0.e+00 1.e-05], p_k = [-2.e-05 -2.e-05], α_k = 0.125
Iteration: 57 - x_57 = [-0.e+00 1.e-05], p_k = [ 2.e-05 -1.e-05], α_k = 0.0625
Iteration: 58 - x_58 = [0.e+00 1.e-05], p_k = [-1.e-05 -1.e-05], α_k = 0.25
Iteration: 59 - x_59 = [-0. 0.], p_k = [ 2.e-05 -1.e-05], α_k = 0.0625
Iteration: 60 - x_60 = [0. 0.], p_k = [-1.e-05 -0.e+00], α_k = 0.125
Iteration: 61 - x_61 = [-0. 0.], p_k = [ 1.e-05 -0.e+00], α_k = 0.0625
Iteration: 62 - x_62 = [0. 0.], p_k = [-0. -0.], α_k = 0.125
Iteration: 63 - x_63 = [-0. 0.], p_k = [ 0. -0.], α_k = 0.125
Iteration: 64 - x_64 = [0. 0.], p_k = [-0. -0.], α_k = 0.0625
Iteration: 65 - x_65 = [-0. 0.], p_k = [ 0. -0.], α_k = 0.125
Iteration: 66 - x_66 = [0. 0.], p_k = [-0. -0.], α_k = 0.125
Iteration: 67 - x_67 = [-0. 0.], p_k = [ 0. -0.], α_k = 0.0625
Iteration: 68 - x_68 = [0. 0.], p_k = [-0. -0.], α_k = 0.125
Iteration: 69 - x_69 = [-0. 0.], p_k = [ 0. -0.], α_k = 0.0625
Iteration: 70 - x_70 = [0. 0.], p_k = [-0. -0.], α_k = 0.25
Iteration: 71 - x_71 = [-0. 0.], p_k = [ 0. -0.], α_k = 0.0625
Iteration: 72 - x_72 = [0. 0.], p_k = [-0. -0.], α_k = 0.125
Iteration: 73 - x_73 = [-0. 0.], p_k = [ 0. -0.], α_k = 0.0625
Iteration: 74 - x_74 = [0. 0.], p_k = [-0. -0.], α_k = 0.25
Iteration: 75 - x_75 = [-0. 0.], p_k = [ 0. -0.], α_k = 0.0625
Iteration: 76 - x_76 = [0. 0.], p_k = [-0. -0.], α_k = 0.125
Iteration: 77 - x_77 = [-0. 0.], p_k = [ 0. -0.], α_k = 0.0625
Series diverged.
time: 43.6 ms
c = 100
print(f"Steepest Descent with c={c}:")
print("=" * 30)
steepest_descent(
f=functools.partial(f, c=c),
f_prime=functools.partial(f_prime, c=c),
x_0=np.array([10.0, 10.0]),
ε=1e-15,
)
Steepest Descent with c=100:
==============================
Iteration: 0 - x_0 = [10. 10.], p_k = [-2000. -20.], α_k = 0.00781
Iteration: 1 - x_1 = [-5.625 9.84375], p_k = [1125. -19.6875], α_k = 0.00781
Iteration: 2 - x_2 = [3.16406 9.68994], p_k = [-632.8125 -19.37988], α_k = 0.00781
Iteration: 3 - x_3 = [-1.77979 9.53854], p_k = [355.95703 -19.07707], α_k = 0.00781
Iteration: 4 - x_4 = [1.00113 9.3895 ], p_k = [-200.22583 -18.77899], α_k = 0.00781
Iteration: 5 - x_5 = [-0.56314 9.24279], p_k = [112.62703 -18.48557], α_k = 0.00781
Iteration: 6 - x_6 = [0.31676 9.09837], p_k = [-63.3527 -18.19673], α_k = 0.00781
Iteration: 7 - x_7 = [-0.17818 8.95621], p_k = [ 35.6359 -17.91241], α_k = 0.00781
Iteration: 8 - x_8 = [0.10023 8.81626], p_k = [-20.04519 -17.63253], α_k = 0.01562
Iteration: 9 - x_9 = [-0.21298 8.54076], p_k = [ 42.59603 -17.08151], α_k = 0.00781
Iteration: 10 - x_10 = [0.1198 8.40731], p_k = [-23.96027 -16.81461], α_k = 0.00781
Iteration: 11 - x_11 = [-0.06739 8.27594], p_k = [ 13.47765 -16.55189], α_k = 0.01562
Iteration: 12 - x_12 = [0.1432 8.01732], p_k = [-28.64001 -16.03464], α_k = 0.00781
Iteration: 13 - x_13 = [-0.08055 7.89205], p_k = [ 16.11 -15.7841], α_k = 0.01562
Iteration: 14 - x_14 = [0.17117 7.64542], p_k = [-34.23376 -15.29084], α_k = 0.00781
Iteration: 15 - x_15 = [-0.09628 7.52596], p_k = [ 19.25649 -15.05193], α_k = 0.01562
Iteration: 16 - x_16 = [0.2046 7.29078], p_k = [-40.92004 -14.58155], α_k = 0.00781
Iteration: 17 - x_17 = [-0.11509 7.17686], p_k = [ 23.01752 -14.35372], α_k = 0.00781
Iteration: 18 - x_18 = [0.06474 7.06472], p_k = [-12.94736 -14.12944], α_k = 0.01562
Iteration: 19 - x_19 = [-0.13757 6.84395], p_k = [ 27.51313 -13.68789], α_k = 0.00781
Iteration: 20 - x_20 = [0.07738 6.73701], p_k = [-15.47614 -13.47402], α_k = 0.01562
Iteration: 21 - x_21 = [-0.16443 6.52648], p_k = [ 32.88679 -13.05296], α_k = 0.00781
Iteration: 22 - x_22 = [0.09249 6.4245 ], p_k = [-18.49882 -12.849 ], α_k = 0.00781
Iteration: 23 - x_23 = [-0.05203 6.32412], p_k = [ 10.40559 -12.64824], α_k = 0.01562
Iteration: 24 - x_24 = [0.11056 6.12649], p_k = [-22.11187 -12.25298], α_k = 0.00781
Iteration: 25 - x_25 = [-0.06219 6.03076], p_k = [ 12.43793 -12.06153], α_k = 0.01562
Iteration: 26 - x_26 = [0.13215 5.8423 ], p_k = [-26.4306 -11.68461], α_k = 0.00781
Iteration: 27 - x_27 = [-0.07434 5.75102], p_k = [ 14.86721 -11.50203], α_k = 0.01562
Iteration: 28 - x_28 = [0.15796 5.5713 ], p_k = [-31.59282 -11.1426 ], α_k = 0.00781
Iteration: 29 - x_29 = [-0.08885 5.48425], p_k = [ 17.77096 -10.96849], α_k = 0.00781
Iteration: 30 - x_30 = [0.04998 5.39855], p_k = [ -9.99617 -10.79711], α_k = 0.01562
Iteration: 31 - x_31 = [-0.10621 5.22985], p_k = [ 21.24185 -10.4597 ], α_k = 0.00781
Iteration: 32 - x_32 = [0.05974 5.14813], p_k = [-11.94854 -10.29627], α_k = 0.01562
Iteration: 33 - x_33 = [-0.12695 4.98725], p_k = [25.39065 -9.97451], α_k = 0.00781
Iteration: 34 - x_34 = [0.07141 4.90933], p_k = [-14.28224 -9.81866], α_k = 0.00781
Iteration: 35 - x_35 = [-0.04017 4.83262], p_k = [ 8.03376 -9.66524], α_k = 0.01562
Iteration: 36 - x_36 = [0.08536 4.6816 ], p_k = [-17.07174 -9.3632 ], α_k = 0.00781
Iteration: 37 - x_37 = [-0.04801 4.60845], p_k = [ 9.60286 -9.2169 ], α_k = 0.01562
Iteration: 38 - x_38 = [0.10203 4.46444], p_k = [-20.40607 -8.92887], α_k = 0.00781
Iteration: 39 - x_39 = [-0.05739 4.39468], p_k = [11.47841 -8.78936], α_k = 0.01562
Iteration: 40 - x_40 = [0.12196 4.25735], p_k = [-24.39163 -8.51469], α_k = 0.00781
Iteration: 41 - x_41 = [-0.0686 4.19083], p_k = [13.72029 -8.38165], α_k = 0.00781
Iteration: 42 - x_42 = [0.03859 4.12534], p_k = [-7.71766 -8.25069], α_k = 0.01562
Iteration: 43 - x_43 = [-0.082 3.99643], p_k = [16.40003 -7.99285], α_k = 0.00781
Iteration: 44 - x_44 = [0.04613 3.93398], p_k = [-9.22502 -7.86796], α_k = 0.01562
Iteration: 45 - x_45 = [-0.09802 3.81105], p_k = [19.60317 -7.62209], α_k = 0.00781
Iteration: 46 - x_46 = [0.05513 3.7515 ], p_k = [-11.02678 -7.503 ], α_k = 0.00781
Iteration: 47 - x_47 = [-0.03101 3.69288], p_k = [ 6.20256 -7.38576], α_k = 0.01562
Iteration: 48 - x_48 = [0.0659 3.57748], p_k = [-13.18045 -7.15496], α_k = 0.00781
Iteration: 49 - x_49 = [-0.03707 3.52158], p_k = [ 7.414 -7.04316], α_k = 0.01562
Iteration: 50 - x_50 = [0.07877 3.41153], p_k = [-15.75476 -6.82306], α_k = 0.00781
Iteration: 51 - x_51 = [-0.04431 3.35823], p_k = [ 8.86205 -6.71645], α_k = 0.01562
Iteration: 52 - x_52 = [0.09416 3.25328], p_k = [-18.83186 -6.50656], α_k = 0.00781
Iteration: 53 - x_53 = [-0.05296 3.20245], p_k = [10.59292 -6.4049 ], α_k = 0.00781
Iteration: 54 - x_54 = [0.02979 3.15241], p_k = [-5.95852 -6.30482], α_k = 0.01562
Iteration: 55 - x_55 = [-0.06331 3.0539 ], p_k = [12.66185 -6.10779], α_k = 0.00781
Iteration: 56 - x_56 = [0.03561 3.00618], p_k = [-7.12229 -6.01236], α_k = 0.01562
Iteration: 57 - x_57 = [-0.07567 2.91224], p_k = [15.13487 -5.82447], α_k = 0.00781
Iteration: 58 - x_58 = [0.04257 2.86673], p_k = [-8.51336 -5.73347], α_k = 0.00781
Iteration: 59 - x_59 = [-0.02394 2.82194], p_k = [ 4.78877 -5.64388], α_k = 0.01562
Iteration: 60 - x_60 = [0.05088 2.73376], p_k = [-10.17613 -5.46751], α_k = 0.00781
Iteration: 61 - x_61 = [-0.02862 2.69104], p_k = [ 5.72407 -5.38208], α_k = 0.01562
Iteration: 62 - x_62 = [0.06082 2.60695], p_k = [-12.16365 -5.21389], α_k = 0.00781
Iteration: 63 - x_63 = [-0.03421 2.56621], p_k = [ 6.84205 -5.13242], α_k = 0.00781
Iteration: 64 - x_64 = [0.01924 2.52611], p_k = [-3.84866 -5.05223], α_k = 0.01562
Iteration: 65 - x_65 = [-0.04089 2.44717], p_k = [ 8.17839 -4.89435], α_k = 0.00781
Iteration: 66 - x_66 = [0.023 2.40894], p_k = [-4.60035 -4.81787], α_k = 0.01562
Iteration: 67 - x_67 = [-0.04888 2.33366], p_k = [ 9.77574 -4.66731], α_k = 0.00781
Iteration: 68 - x_68 = [0.02749 2.29719], p_k = [-5.49885 -4.59439], α_k = 0.01562
Iteration: 69 - x_69 = [-0.05843 2.22541], p_k = [11.68506 -4.45081], α_k = 0.00781
Iteration: 70 - x_70 = [0.03286 2.19063], p_k = [-6.57285 -4.38127], α_k = 0.00781
Iteration: 71 - x_71 = [-0.01849 2.15641], p_k = [ 3.69723 -4.31281], α_k = 0.01562
Iteration: 72 - x_72 = [0.03928 2.08902], p_k = [-7.85661 -4.17804], α_k = 0.00781
Iteration: 73 - x_73 = [-0.0221 2.05638], p_k = [ 4.41934 -4.11275], α_k = 0.01562
Iteration: 74 - x_74 = [0.04696 1.99212], p_k = [-9.3911 -3.98423], α_k = 0.00781
Iteration: 75 - x_75 = [-0.02641 1.96099], p_k = [ 5.28249 -3.92198], α_k = 0.00781
Iteration: 76 - x_76 = [0.01486 1.93035], p_k = [-2.9714 -3.8607], α_k = 0.01562
Iteration: 77 - x_77 = [-0.03157 1.87002], p_k = [ 6.31423 -3.74005], α_k = 0.00781
Iteration: 78 - x_78 = [0.01776 1.84081], p_k = [-3.55175 -3.68161], α_k = 0.01562
Iteration: 79 - x_79 = [-0.03774 1.78328], p_k = [ 7.54748 -3.56656], α_k = 0.00781
Iteration: 80 - x_80 = [0.02123 1.75542], p_k = [-4.24546 -3.51083], α_k = 0.01562
Iteration: 81 - x_81 = [-0.04511 1.70056], p_k = [ 9.02159 -3.40112], α_k = 0.00781
Iteration: 82 - x_82 = [0.02537 1.67399], p_k = [-5.07465 -3.34798], α_k = 0.00781
Iteration: 83 - x_83 = [-0.01427 1.64783], p_k = [ 2.85449 -3.29567], α_k = 0.01562
Iteration: 84 - x_84 = [0.03033 1.59634], p_k = [-6.06579 -3.19268], α_k = 0.00781
Iteration: 85 - x_85 = [-0.01706 1.5714 ], p_k = [ 3.41201 -3.14279], α_k = 0.01562
Iteration: 86 - x_86 = [0.03625 1.52229], p_k = [-7.25051 -3.04458], α_k = 0.00781
Iteration: 87 - x_87 = [-0.02039 1.4985 ], p_k = [ 4.07841 -2.99701], α_k = 0.00781
Iteration: 88 - x_88 = [0.01147 1.47509], p_k = [-2.29411 -2.95018], α_k = 0.01562
Iteration: 89 - x_89 = [-0.02437 1.42899], p_k = [ 4.87498 -2.85799], α_k = 0.00781
Iteration: 90 - x_90 = [0.01371 1.40666], p_k = [-2.74218 -2.81333], α_k = 0.01562
Iteration: 91 - x_91 = [-0.02914 1.36271], p_k = [ 5.82712 -2.72541], α_k = 0.00781
Iteration: 92 - x_92 = [0.01639 1.34141], p_k = [-3.27776 -2.68283], α_k = 0.01562
Iteration: 93 - x_93 = [-0.03483 1.29949], p_k = [ 6.96523 -2.59899], α_k = 0.00781
Iteration: 94 - x_94 = [0.01959 1.27919], p_k = [-3.91794 -2.55838], α_k = 0.00781
Iteration: 95 - x_95 = [-0.01102 1.2592 ], p_k = [ 2.20384 -2.51841], α_k = 0.01562
Iteration: 96 - x_96 = [0.02342 1.21985], p_k = [-4.68317 -2.43971], α_k = 0.00781
Iteration: 97 - x_97 = [-0.01317 1.20079], p_k = [ 2.63428 -2.40159], α_k = 0.01562
Iteration: 98 - x_98 = [0.02799 1.16327], p_k = [-5.59785 -2.32654], α_k = 0.00781
Iteration: 99 - x_99 = [-0.01574 1.14509], p_k = [ 3.14879 -2.29018], α_k = 0.00781
Iteration: 100 - x_100 = [0.00886 1.1272 ], p_k = [-1.77119 -2.2544 ], α_k = 0.01562
Iteration: 101 - x_101 = [-0.01882 1.09197], p_k = [ 3.76379 -2.18395], α_k = 0.00781
Iteration: 102 - x_102 = [0.01059 1.07491], p_k = [-2.11713 -2.14983], α_k = 0.01562
Iteration: 103 - x_103 = [-0.02249 1.04132], p_k = [ 4.4989 -2.08264], α_k = 0.00781
Iteration: 104 - x_104 = [0.01265 1.02505], p_k = [-2.53063 -2.0501 ], α_k = 0.01562
Iteration: 105 - x_105 = [-0.02689 0.99302], p_k = [ 5.37759 -1.98604], α_k = 0.00781
Iteration: 106 - x_106 = [0.01512 0.9775 ], p_k = [-3.0249 -1.955 ], α_k = 0.00781
Iteration: 107 - x_107 = [-0.00851 0.96223], p_k = [ 1.7015 -1.92446], α_k = 0.01562
Iteration: 108 - x_108 = [0.01808 0.93216], p_k = [-3.6157 -1.86432], α_k = 0.00781
Iteration: 109 - x_109 = [-0.01017 0.91759], p_k = [ 2.03383 -1.83519], α_k = 0.01562
Iteration: 110 - x_110 = [0.02161 0.88892], p_k = [-4.32189 -1.77784], α_k = 0.00781
Iteration: 111 - x_111 = [-0.01216 0.87503], p_k = [ 2.43106 -1.75006], α_k = 0.00781
Iteration: 112 - x_112 = [0.00684 0.86136], p_k = [-1.36747 -1.72272], α_k = 0.01562
Iteration: 113 - x_113 = [-0.01453 0.83444], p_k = [ 2.90588 -1.66888], α_k = 0.00781
Iteration: 114 - x_114 = [0.00817 0.8214 ], p_k = [-1.63456 -1.6428 ], α_k = 0.01562
Iteration: 115 - x_115 = [-0.01737 0.79573], p_k = [ 3.47343 -1.59147], α_k = 0.00781
Iteration: 116 - x_116 = [0.00977 0.7833 ], p_k = [-1.95381 -1.5666 ], α_k = 0.01562
Iteration: 117 - x_117 = [-0.02076 0.75882], p_k = [ 4.15184 -1.51764], α_k = 0.00781
Iteration: 118 - x_118 = [0.01168 0.74697], p_k = [-2.33541 -1.49393], α_k = 0.00781
Iteration: 119 - x_119 = [-0.00657 0.73529], p_k = [ 1.31367 -1.47059], α_k = 0.01562
Iteration: 120 - x_120 = [0.01396 0.71232], p_k = [-2.79154 -1.42463], α_k = 0.00781
Iteration: 121 - x_121 = [-0.00785 0.70119], p_k = [ 1.57024 -1.40237], α_k = 0.01562
Iteration: 122 - x_122 = [0.01668 0.67927], p_k = [-3.33677 -1.35855], α_k = 0.00781
Iteration: 123 - x_123 = [-0.00938 0.66866], p_k = [ 1.87693 -1.33732], α_k = 0.00781
Iteration: 124 - x_124 = [0.00528 0.65821], p_k = [-1.05577 -1.31642], α_k = 0.01562
Iteration: 125 - x_125 = [-0.01122 0.63764], p_k = [ 2.24352 -1.27529], α_k = 0.00781
Iteration: 126 - x_126 = [0.00631 0.62768], p_k = [-1.26198 -1.25536], α_k = 0.01562
Iteration: 127 - x_127 = [-0.01341 0.60807], p_k = [ 2.68171 -1.21613], α_k = 0.00781
Iteration: 128 - x_128 = [0.00754 0.59856], p_k = [-1.50846 -1.19713], α_k = 0.01562
Iteration: 129 - x_129 = [-0.01603 0.57986], p_k = [ 3.20548 -1.15972], α_k = 0.00781
Iteration: 130 - x_130 = [0.00902 0.5708 ], p_k = [-1.80308 -1.1416 ], α_k = 0.00781
Iteration: 131 - x_131 = [-0.00507 0.56188], p_k = [ 1.01423 -1.12376], α_k = 0.01562
Iteration: 132 - x_132 = [0.01078 0.54432], p_k = [-2.15525 -1.08864], α_k = 0.00781
Iteration: 133 - x_133 = [-0.00606 0.53582], p_k = [ 1.21233 -1.07163], α_k = 0.01562
Iteration: 134 - x_134 = [0.01288 0.51907], p_k = [-2.57619 -1.03814], α_k = 0.00781
Iteration: 135 - x_135 = [-0.00725 0.51096], p_k = [ 1.44911 -1.02192], α_k = 0.00781
Iteration: 136 - x_136 = [0.00408 0.50298], p_k = [-0.81512 -1.00596], α_k = 0.01562
Iteration: 137 - x_137 = [-0.00866 0.48726], p_k = [ 1.73214 -0.97452], α_k = 0.00781
Iteration: 138 - x_138 = [0.00487 0.47965], p_k = [-0.97433 -0.95929], α_k = 0.01562
Iteration: 139 - x_139 = [-0.01035 0.46466], p_k = [ 2.07044 -0.92931], α_k = 0.00781
Iteration: 140 - x_140 = [0.00582 0.4574 ], p_k = [-1.16463 -0.91479], α_k = 0.01562
Iteration: 141 - x_141 = [-0.01237 0.4431 ], p_k = [ 2.47483 -0.88621], α_k = 0.00781
Iteration: 142 - x_142 = [0.00696 0.43618], p_k = [-1.39209 -0.87236], α_k = 0.00781
Iteration: 143 - x_143 = [-0.00392 0.42936], p_k = [ 0.78305 -0.85873], α_k = 0.01562
Iteration: 144 - x_144 = [0.00832 0.41595], p_k = [-1.66398 -0.83189], α_k = 0.00781
Iteration: 145 - x_145 = [-0.00468 0.40945], p_k = [ 0.93599 -0.8189 ], α_k = 0.01562
Iteration: 146 - x_146 = [0.00994 0.39665], p_k = [-1.98898 -0.7933 ], α_k = 0.00781
Iteration: 147 - x_147 = [-0.00559 0.39045], p_k = [ 1.1188 -0.78091], α_k = 0.00781
Iteration: 148 - x_148 = [0.00315 0.38435], p_k = [-0.62933 -0.76871], α_k = 0.01562
Iteration: 149 - x_149 = [-0.00669 0.37234], p_k = [ 1.33732 -0.74469], α_k = 0.00781
Iteration: 150 - x_150 = [0.00376 0.36652], p_k = [-0.75224 -0.73305], α_k = 0.01562
Iteration: 151 - x_151 = [-0.00799 0.35507], p_k = [ 1.59851 -0.71014], α_k = 0.00781
Iteration: 152 - x_152 = [0.0045 0.34952], p_k = [-0.89916 -0.69905], α_k = 0.01562
Iteration: 153 - x_153 = [-0.00955 0.3386 ], p_k = [ 1.91072 -0.6772 ], α_k = 0.00781
Iteration: 154 - x_154 = [0.00537 0.33331], p_k = [-1.07478 -0.66662], α_k = 0.00781
Iteration: 155 - x_155 = [-0.00302 0.3281 ], p_k = [ 0.60456 -0.6562 ], α_k = 0.01562
Iteration: 156 - x_156 = [0.00642 0.31785], p_k = [-1.2847 -0.6357], α_k = 0.00781
Iteration: 157 - x_157 = [-0.00361 0.31288], p_k = [ 0.72264 -0.62576], α_k = 0.01562
Iteration: 158 - x_158 = [0.00768 0.3031 ], p_k = [-1.53562 -0.60621], α_k = 0.00781
Iteration: 159 - x_159 = [-0.00432 0.29837], p_k = [ 0.86378 -0.59674], α_k = 0.00781
Iteration: 160 - x_160 = [0.00243 0.29371], p_k = [-0.48588 -0.58741], α_k = 0.01562
Iteration: 161 - x_161 = [-0.00516 0.28453], p_k = [ 1.03249 -0.56906], α_k = 0.00781
Iteration: 162 - x_162 = [0.0029 0.28008], p_k = [-0.58078 -0.56017], α_k = 0.01562
Iteration: 163 - x_163 = [-0.00617 0.27133], p_k = [ 1.23415 -0.54266], α_k = 0.00781
Iteration: 164 - x_164 = [0.00347 0.26709], p_k = [-0.69421 -0.53418], α_k = 0.01562
Iteration: 165 - x_165 = [-0.00738 0.25874], p_k = [ 1.4752 -0.51749], α_k = 0.00781
Iteration: 166 - x_166 = [0.00415 0.2547 ], p_k = [-0.8298 -0.5094], α_k = 0.00781
Iteration: 167 - x_167 = [-0.00233 0.25072], p_k = [ 0.46676 -0.50144], α_k = 0.01562
Iteration: 168 - x_168 = [0.00496 0.24289], p_k = [-0.99187 -0.48577], α_k = 0.00781
Iteration: 169 - x_169 = [-0.00279 0.23909], p_k = [ 0.55793 -0.47818], α_k = 0.01562
Iteration: 170 - x_170 = [0.00593 0.23162], p_k = [-1.18559 -0.46324], α_k = 0.00781
Iteration: 171 - x_171 = [-0.00333 0.228 ], p_k = [ 0.6669 -0.456 ], α_k = 0.00781
Iteration: 172 - x_172 = [0.00188 0.22444], p_k = [-0.37513 -0.44888], α_k = 0.01562
Iteration: 173 - x_173 = [-0.00399 0.21742], p_k = [ 0.79715 -0.43485], α_k = 0.00781
Iteration: 174 - x_174 = [0.00224 0.21403], p_k = [-0.4484 -0.42805], α_k = 0.01562
Iteration: 175 - x_175 = [-0.00476 0.20734], p_k = [ 0.95284 -0.41468], α_k = 0.00781
Iteration: 176 - x_176 = [0.00268 0.2041 ], p_k = [-0.53597 -0.4082 ], α_k = 0.01562
Iteration: 177 - x_177 = [-0.00569 0.19772], p_k = [ 1.13894 -0.39544], α_k = 0.00781
Iteration: 178 - x_178 = [0.0032 0.19463], p_k = [-0.64066 -0.38926], α_k = 0.00781
Iteration: 179 - x_179 = [-0.0018 0.19159], p_k = [ 0.36037 -0.38318], α_k = 0.01562
Iteration: 180 - x_180 = [0.00383 0.1856 ], p_k = [-0.76578 -0.37121], α_k = 0.00781
Iteration: 181 - x_181 = [-0.00215 0.1827 ], p_k = [ 0.43075 -0.36541], α_k = 0.01562
Iteration: 182 - x_182 = [0.00458 0.17699], p_k = [-0.91535 -0.35399], α_k = 0.00781
Iteration: 183 - x_183 = [-0.00257 0.17423], p_k = [ 0.51488 -0.34846], α_k = 0.00781
Iteration: 184 - x_184 = [0.00145 0.17151], p_k = [-0.28962 -0.34301], α_k = 0.01562
Iteration: 185 - x_185 = [-0.00308 0.16615], p_k = [ 0.61545 -0.33229], α_k = 0.00781
Iteration: 186 - x_186 = [0.00173 0.16355], p_k = [-0.34619 -0.3271 ], α_k = 0.01562
Iteration: 187 - x_187 = [-0.00368 0.15844], p_k = [ 0.73565 -0.31688], α_k = 0.00781
Iteration: 188 - x_188 = [0.00207 0.15596], p_k = [-0.4138 -0.31193], α_k = 0.00781
Iteration: 189 - x_189 = [-0.00116 0.15353], p_k = [ 0.23277 -0.30705], α_k = 0.01562
Iteration: 190 - x_190 = [0.00247 0.14873], p_k = [-0.49463 -0.29746], α_k = 0.00781
Iteration: 191 - x_191 = [-0.00139 0.14641], p_k = [ 0.27823 -0.29281], α_k = 0.01562
Iteration: 192 - x_192 = [0.00296 0.14183], p_k = [-0.59123 -0.28366], α_k = 0.00781
Iteration: 193 - x_193 = [-0.00166 0.13961], p_k = [ 0.33257 -0.27923], α_k = 0.01562
Iteration: 194 - x_194 = [0.00353 0.13525], p_k = [-0.70671 -0.2705 ], α_k = 0.00781
Iteration: 195 - x_195 = [-0.00199 0.13314], p_k = [ 0.39752 -0.26628], α_k = 0.00781
Iteration: 196 - x_196 = [0.00112 0.13106], p_k = [-0.22361 -0.26211], α_k = 0.01562
Iteration: 197 - x_197 = [-0.00238 0.12696], p_k = [ 0.47516 -0.25392], α_k = 0.00781
Iteration: 198 - x_198 = [0.00134 0.12498], p_k = [-0.26728 -0.24996], α_k = 0.01562
Iteration: 199 - x_199 = [-0.00284 0.12107], p_k = [ 0.56797 -0.24215], α_k = 0.00781
Iteration: 200 - x_200 = [0.0016 0.11918], p_k = [-0.31948 -0.23836], α_k = 0.00781
Iteration: 201 - x_201 = [-0.0009 0.11732], p_k = [ 0.17971 -0.23464], α_k = 0.01562
Iteration: 202 - x_202 = [0.00191 0.11365], p_k = [-0.38188 -0.2273 ], α_k = 0.00781
Iteration: 203 - x_203 = [-0.00107 0.11188], p_k = [ 0.21481 -0.22375], α_k = 0.01562
Iteration: 204 - x_204 = [0.00228 0.10838], p_k = [-0.45647 -0.21676], α_k = 0.00781
Iteration: 205 - x_205 = [-0.00128 0.10669], p_k = [ 0.25676 -0.21337], α_k = 0.01562
Iteration: 206 - x_206 = [0.00273 0.10335], p_k = [-0.54562 -0.20671], α_k = 0.00781
Iteration: 207 - x_207 = [-0.00153 0.10174], p_k = [ 0.30691 -0.20348], α_k = 0.00781
Iteration: 208 - x_208 = [0.00086 0.10015], p_k = [-0.17264 -0.2003 ], α_k = 0.01562
Iteration: 209 - x_209 = [-0.00183 0.09702], p_k = [ 0.36686 -0.19404], α_k = 0.00781
Iteration: 210 - x_210 = [0.00103 0.0955 ], p_k = [-0.20636 -0.19101], α_k = 0.01562
Iteration: 211 - x_211 = [-0.00219 0.09252], p_k = [ 0.43851 -0.18504], α_k = 0.00781
Iteration: 212 - x_212 = [0.00123 0.09107], p_k = [-0.24666 -0.18215], α_k = 0.00781
Iteration: 213 - x_213 = [-0.00069 0.08965], p_k = [ 0.13875 -0.1793 ], α_k = 0.01562
Iteration: 214 - x_214 = [0.00147 0.08685], p_k = [-0.29484 -0.1737 ], α_k = 0.00781
Iteration: 215 - x_215 = [-0.00083 0.08549], p_k = [ 0.16585 -0.17098], α_k = 0.01562
Iteration: 216 - x_216 = [0.00176 0.08282], p_k = [-0.35242 -0.16564], α_k = 0.00781
Iteration: 217 - x_217 = [-0.00099 0.08153], p_k = [ 0.19824 -0.16305], α_k = 0.01562
Iteration: 218 - x_218 = [0.00211 0.07898], p_k = [-0.42125 -0.15796], α_k = 0.00781
Iteration: 219 - x_219 = [-0.00118 0.07774], p_k = [ 0.23696 -0.15549], α_k = 0.00781
Iteration: 220 - x_220 = [0.00067 0.07653], p_k = [-0.13329 -0.15306], α_k = 0.01562
Iteration: 221 - x_221 = [-0.00142 0.07414], p_k = [ 0.28324 -0.14828], α_k = 0.00781
Iteration: 222 - x_222 = [0.0008 0.07298], p_k = [-0.15932 -0.14596], α_k = 0.01562
Iteration: 223 - x_223 = [-0.00169 0.0707 ], p_k = [ 0.33856 -0.1414 ], α_k = 0.00781
Iteration: 224 - x_224 = [0.00095 0.06959], p_k = [-0.19044 -0.13919], α_k = 0.00781
Iteration: 225 - x_225 = [-0.00054 0.06851], p_k = [ 0.10712 -0.13701], α_k = 0.01562
Iteration: 226 - x_226 = [0.00114 0.06637], p_k = [-0.22763 -0.13273], α_k = 0.00781
Iteration: 227 - x_227 = [-0.00064 0.06533], p_k = [ 0.12804 -0.13066], α_k = 0.01562
Iteration: 228 - x_228 = [0.00136 0.06329], p_k = [-0.27209 -0.12657], α_k = 0.00781
Iteration: 229 - x_229 = [-0.00077 0.0623 ], p_k = [ 0.15305 -0.1246 ], α_k = 0.01562
Iteration: 230 - x_230 = [0.00163 0.06035], p_k = [-0.32523 -0.1207 ], α_k = 0.00781
Iteration: 231 - x_231 = [-0.00091 0.05941], p_k = [ 0.18294 -0.11882], α_k = 0.00781
Iteration: 232 - x_232 = [0.00051 0.05848], p_k = [-0.10291 -0.11696], α_k = 0.01562
Iteration: 233 - x_233 = [-0.00109 0.05665], p_k = [ 0.21868 -0.11331], α_k = 0.00781
Iteration: 234 - x_234 = [0.00062 0.05577], p_k = [-0.12301 -0.11154], α_k = 0.01562
Iteration: 235 - x_235 = [-0.00131 0.05402], p_k = [ 0.26139 -0.10805], α_k = 0.00781
Iteration: 236 - x_236 = [0.00074 0.05318], p_k = [-0.14703 -0.10636], α_k = 0.00781
Iteration: 237 - x_237 = [-0.00041 0.05235], p_k = [ 0.0827 -0.1047], α_k = 0.01562
Iteration: 238 - x_238 = [0.00088 0.05071], p_k = [-0.17575 -0.10143], α_k = 0.00781
Iteration: 239 - x_239 = [-0.00049 0.04992], p_k = [ 0.09886 -0.09984], α_k = 0.01562
Iteration: 240 - x_240 = [0.00105 0.04836], p_k = [-0.21007 -0.09672], α_k = 0.00781
Iteration: 241 - x_241 = [-0.00059 0.04761], p_k = [ 0.11817 -0.09521], α_k = 0.01562
Iteration: 242 - x_242 = [0.00126 0.04612], p_k = [-0.2511 -0.09224], α_k = 0.00781
Iteration: 243 - x_243 = [-0.00071 0.0454 ], p_k = [ 0.14124 -0.09079], α_k = 0.00781
Iteration: 244 - x_244 = [0.0004 0.04469], p_k = [-0.07945 -0.08938], α_k = 0.01562
Iteration: 245 - x_245 = [-0.00084 0.04329], p_k = [ 0.16883 -0.08658], α_k = 0.00781
Iteration: 246 - x_246 = [0.00047 0.04262], p_k = [-0.09497 -0.08523], α_k = 0.01562
Iteration: 247 - x_247 = [-0.00101 0.04128], p_k = [ 0.20181 -0.08257], α_k = 0.00781
Iteration: 248 - x_248 = [0.00057 0.04064], p_k = [-0.11352 -0.08128], α_k = 0.00781
Iteration: 249 - x_249 = [-0.00032 0.04 ], p_k = [ 0.06385 -0.08001], α_k = 0.01562
Iteration: 250 - x_250 = [0.00068 0.03875], p_k = [-0.13569 -0.07751], α_k = 0.00781
Iteration: 251 - x_251 = [-0.00038 0.03815], p_k = [ 0.07632 -0.0763 ], α_k = 0.01562
Iteration: 252 - x_252 = [0.00081 0.03696], p_k = [-0.16219 -0.07391], α_k = 0.00781
Iteration: 253 - x_253 = [-0.00046 0.03638], p_k = [ 0.09123 -0.07276], α_k = 0.01562
Iteration: 254 - x_254 = [0.00097 0.03524], p_k = [-0.19387 -0.07048], α_k = 0.00781
Iteration: 255 - x_255 = [-0.00055 0.03469], p_k = [ 0.10905 -0.06938], α_k = 0.00781
Iteration: 256 - x_256 = [0.00031 0.03415], p_k = [-0.06134 -0.0683 ], α_k = 0.01562
Iteration: 257 - x_257 = [-0.00065 0.03308], p_k = [ 0.13035 -0.06616], α_k = 0.00781
Iteration: 258 - x_258 = [0.00037 0.03256], p_k = [-0.07332 -0.06513], α_k = 0.01562
Iteration: 259 - x_259 = [-0.00078 0.03155], p_k = [ 0.15581 -0.06309], α_k = 0.00781
Iteration: 260 - x_260 = [0.00044 0.03105], p_k = [-0.08764 -0.06211], α_k = 0.00781
Iteration: 261 - x_261 = [-0.00025 0.03057], p_k = [ 0.0493 -0.06114], α_k = 0.01562
Iteration: 262 - x_262 = [0.00052 0.02961], p_k = [-0.10476 -0.05923], α_k = 0.00781
Iteration: 263 - x_263 = [-0.00029 0.02915], p_k = [ 0.05893 -0.0583 ], α_k = 0.01562
Iteration: 264 - x_264 = [0.00063 0.02824], p_k = [-0.12522 -0.05648], α_k = 0.00781
Iteration: 265 - x_265 = [-0.00035 0.0278 ], p_k = [ 0.07044 -0.0556 ], α_k = 0.01562
Iteration: 266 - x_266 = [0.00075 0.02693], p_k = [-0.14968 -0.05386], α_k = 0.00781
Iteration: 267 - x_267 = [-0.00042 0.02651], p_k = [ 0.08419 -0.05302], α_k = 0.00781
Iteration: 268 - x_268 = [0.00024 0.0261 ], p_k = [-0.04736 -0.05219], α_k = 0.01562
Iteration: 269 - x_269 = [-0.0005 0.02528], p_k = [ 0.10064 -0.05056], α_k = 0.00781
Iteration: 270 - x_270 = [0.00028 0.02488], p_k = [-0.05661 -0.04977], α_k = 0.01562
Iteration: 271 - x_271 = [-0.0006 0.02411], p_k = [ 0.12029 -0.04821], α_k = 0.00781
Iteration: 272 - x_272 = [0.00034 0.02373], p_k = [-0.06766 -0.04746], α_k = 0.00781
Iteration: 273 - x_273 = [-0.00019 0.02336], p_k = [ 0.03806 -0.04672], α_k = 0.01562
Iteration: 274 - x_274 = [0.0004 0.02263], p_k = [-0.08088 -0.04526], α_k = 0.00781
Iteration: 275 - x_275 = [-0.00023 0.02228], p_k = [ 0.0455 -0.04455], α_k = 0.01562
Iteration: 276 - x_276 = [0.00048 0.02158], p_k = [-0.09668 -0.04316], α_k = 0.00781
Iteration: 277 - x_277 = [-0.00027 0.02124], p_k = [ 0.05438 -0.04249], α_k = 0.01562
Iteration: 278 - x_278 = [0.00058 0.02058], p_k = [-0.11556 -0.04116], α_k = 0.00781
Iteration: 279 - x_279 = [-0.00033 0.02026], p_k = [ 0.065 -0.04051], α_k = 0.00781
Iteration: 280 - x_280 = [0.00018 0.01994], p_k = [-0.03656 -0.03988], α_k = 0.01562
Iteration: 281 - x_281 = [-0.00039 0.01932], p_k = [ 0.0777 -0.03864], α_k = 0.00781
Iteration: 282 - x_282 = [0.00022 0.01902], p_k = [-0.04371 -0.03803], α_k = 0.01562
Iteration: 283 - x_283 = [-0.00046 0.01842], p_k = [ 0.09287 -0.03684], α_k = 0.00781
Iteration: 284 - x_284 = [0.00026 0.01813], p_k = [-0.05224 -0.03627], α_k = 0.00781
Iteration: 285 - x_285 = [-0.00015 0.01785], p_k = [ 0.02939 -0.0357 ], α_k = 0.01562
Iteration: 286 - x_286 = [0.00031 0.01729], p_k = [-0.06244 -0.03458], α_k = 0.00781
Iteration: 287 - x_287 = [-0.00018 0.01702], p_k = [ 0.03513 -0.03404], α_k = 0.01562
Iteration: 288 - x_288 = [0.00037 0.01649], p_k = [-0.07464 -0.03298], α_k = 0.00781
Iteration: 289 - x_289 = [-0.00021 0.01623], p_k = [ 0.04199 -0.03247], α_k = 0.01562
Iteration: 290 - x_290 = [0.00045 0.01573], p_k = [-0.08922 -0.03145], α_k = 0.00781
Iteration: 291 - x_291 = [-0.00025 0.01548], p_k = [ 0.05019 -0.03096], α_k = 0.00781
Iteration: 292 - x_292 = [0.00014 0.01524], p_k = [-0.02823 -0.03048], α_k = 0.01562
Iteration: 293 - x_293 = [-0.0003 0.01476], p_k = [ 0.05999 -0.02952], α_k = 0.00781
Iteration: 294 - x_294 = [0.00017 0.01453], p_k = [-0.03374 -0.02906], α_k = 0.01562
Iteration: 295 - x_295 = [-0.00036 0.01408], p_k = [ 0.0717 -0.02815], α_k = 0.00781
Iteration: 296 - x_296 = [0.0002 0.01386], p_k = [-0.04033 -0.02771], α_k = 0.00781
Iteration: 297 - x_297 = [-0.00011 0.01364], p_k = [ 0.02269 -0.02728], α_k = 0.01562
Iteration: 298 - x_298 = [0.00024 0.01321], p_k = [-0.04821 -0.02643], α_k = 0.00781
Iteration: 299 - x_299 = [-0.00014 0.01301], p_k = [ 0.02712 -0.02602], α_k = 0.01562
Iteration: 300 - x_300 = [0.00029 0.0126 ], p_k = [-0.05763 -0.0252 ], α_k = 0.00781
Iteration: 301 - x_301 = [-0.00016 0.0124 ], p_k = [ 0.03242 -0.02481], α_k = 0.01562
Iteration: 302 - x_302 = [0.00034 0.01202], p_k = [-0.06888 -0.02403], α_k = 0.00781
Iteration: 303 - x_303 = [-0.00019 0.01183], p_k = [ 0.03875 -0.02366], α_k = 0.00781
Iteration: 304 - x_304 = [0.00011 0.01164], p_k = [-0.02179 -0.02329], α_k = 0.01562
Iteration: 305 - x_305 = [-0.00023 0.01128], p_k = [ 0.04631 -0.02256], α_k = 0.00781
Iteration: 306 - x_306 = [0.00013 0.0111 ], p_k = [-0.02605 -0.02221], α_k = 0.01562
Iteration: 307 - x_307 = [-0.00028 0.01076], p_k = [ 0.05536 -0.02151], α_k = 0.00781
Iteration: 308 - x_308 = [0.00016 0.01059], p_k = [-0.03114 -0.02118], α_k = 0.00781
Iteration: 309 - x_309 = [-9.000e-05 1.042e-02], p_k = [ 0.01752 -0.02085], α_k = 0.01562
Iteration: 310 - x_310 = [0.00019 0.0101 ], p_k = [-0.03722 -0.0202 ], α_k = 0.00781
Iteration: 311 - x_311 = [-0.0001 0.00994], p_k = [ 0.02094 -0.01988], α_k = 0.01562
Iteration: 312 - x_312 = [0.00022 0.00963], p_k = [-0.04449 -0.01926], α_k = 0.00781
Iteration: 313 - x_313 = [-0.00013 0.00948], p_k = [ 0.02503 -0.01896], α_k = 0.01562
Iteration: 314 - x_314 = [0.00027 0.00918], p_k = [-0.05318 -0.01837], α_k = 0.00781
Iteration: 315 - x_315 = [-0.00015 0.00904], p_k = [ 0.02991 -0.01808], α_k = 0.00781
Iteration: 316 - x_316 = [8.0e-05 8.9e-03], p_k = [-0.01683 -0.0178 ], α_k = 0.01562
Iteration: 317 - x_317 = [-0.00018 0.00862], p_k = [ 0.03576 -0.01724], α_k = 0.00781
Iteration: 318 - x_318 = [0.0001 0.00849], p_k = [-0.02011 -0.01697], α_k = 0.01562
Iteration: 319 - x_319 = [-0.00021 0.00822], p_k = [ 0.04274 -0.01644], α_k = 0.00781
Iteration: 320 - x_320 = [0.00012 0.00809], p_k = [-0.02404 -0.01618], α_k = 0.00781
Iteration: 321 - x_321 = [-7.00e-05 7.97e-03], p_k = [ 0.01352 -0.01593], α_k = 0.01562
Iteration: 322 - x_322 = [0.00014 0.00772], p_k = [-0.02874 -0.01543], α_k = 0.00781
Iteration: 323 - x_323 = [-8.0e-05 7.6e-03], p_k = [ 0.01616 -0.01519], α_k = 0.01562
Iteration: 324 - x_324 = [0.00017 0.00736], p_k = [-0.03435 -0.01472], α_k = 0.00781
Iteration: 325 - x_325 = [-0.0001 0.00724], p_k = [ 0.01932 -0.01449], α_k = 0.00781
Iteration: 326 - x_326 = [5.00e-05 7.13e-03], p_k = [-0.01087 -0.01426], α_k = 0.01562
Iteration: 327 - x_327 = [-0.00012 0.00691], p_k = [ 0.0231 -0.01381], α_k = 0.00781
Iteration: 328 - x_328 = [6.0e-05 6.8e-03], p_k = [-0.01299 -0.0136 ], α_k = 0.01562
Iteration: 329 - x_329 = [-0.00014 0.00659], p_k = [ 0.02761 -0.01317], α_k = 0.00781
Iteration: 330 - x_330 = [8.00e-05 6.48e-03], p_k = [-0.01553 -0.01297], α_k = 0.01562
Iteration: 331 - x_331 = [-0.00016 0.00628], p_k = [ 0.033 -0.01256], α_k = 0.00781
Iteration: 332 - x_332 = [9.00e-05 6.18e-03], p_k = [-0.01856 -0.01237], α_k = 0.00781
Iteration: 333 - x_333 = [-5.00e-05 6.09e-03], p_k = [ 0.01044 -0.01217], α_k = 0.01562
Iteration: 334 - x_334 = [0.00011 0.0059 ], p_k = [-0.02219 -0.01179], α_k = 0.00781
Iteration: 335 - x_335 = [-6.0e-05 5.8e-03], p_k = [ 0.01248 -0.01161], α_k = 0.01562
Iteration: 336 - x_336 = [0.00013 0.00562], p_k = [-0.02652 -0.01125], α_k = 0.00781
Iteration: 337 - x_337 = [-7.00e-05 5.54e-03], p_k = [ 0.01492 -0.01107], α_k = 0.00781
Iteration: 338 - x_338 = [4.00e-05 5.45e-03], p_k = [-0.00839 -0.0109 ], α_k = 0.01562
Iteration: 339 - x_339 = [-9.00e-05 5.28e-03], p_k = [ 0.01783 -0.01056], α_k = 0.00781
Iteration: 340 - x_340 = [5.0e-05 5.2e-03], p_k = [-0.01003 -0.01039], α_k = 0.01562
Iteration: 341 - x_341 = [-0.00011 0.00503], p_k = [ 0.02131 -0.01007], α_k = 0.00781
Iteration: 342 - x_342 = [6.00e-05 4.95e-03], p_k = [-0.01199 -0.00991], α_k = 0.01562
Iteration: 343 - x_343 = [-0.00013 0.0048 ], p_k = [ 0.02548 -0.0096 ], α_k = 0.00781
Iteration: 344 - x_344 = [7.00e-05 4.72e-03], p_k = [-0.01433 -0.00945], α_k = 0.00781
Iteration: 345 - x_345 = [-4.00e-05 4.65e-03], p_k = [ 0.00806 -0.0093 ], α_k = 0.01562
Iteration: 346 - x_346 = [9.00e-05 4.51e-03], p_k = [-0.01713 -0.00901], α_k = 0.00781
Iteration: 347 - x_347 = [-5.00e-05 4.44e-03], p_k = [ 0.00964 -0.00887], α_k = 0.01562
Iteration: 348 - x_348 = [0.0001 0.0043], p_k = [-0.02048 -0.00859], α_k = 0.00781
Iteration: 349 - x_349 = [-6.00e-05 4.23e-03], p_k = [ 0.01152 -0.00846], α_k = 0.00781
Iteration: 350 - x_350 = [3.00e-05 4.16e-03], p_k = [-0.00648 -0.00833], α_k = 0.01562
Iteration: 351 - x_351 = [-7.00e-05 4.03e-03], p_k = [ 0.01377 -0.00807], α_k = 0.00781
Iteration: 352 - x_352 = [4.00e-05 3.97e-03], p_k = [-0.00774 -0.00794], α_k = 0.01562
Iteration: 353 - x_353 = [-8.00e-05 3.85e-03], p_k = [ 0.01646 -0.00769], α_k = 0.00781
Iteration: 354 - x_354 = [5.00e-05 3.79e-03], p_k = [-0.00926 -0.00757], α_k = 0.01562
Iteration: 355 - x_355 = [-0.0001 0.00367], p_k = [ 0.01967 -0.00734], α_k = 0.00781
Iteration: 356 - x_356 = [6.00e-05 3.61e-03], p_k = [-0.01106 -0.00722], α_k = 0.00781
Iteration: 357 - x_357 = [-3.00e-05 3.55e-03], p_k = [ 0.00622 -0.00711], α_k = 0.01562
Iteration: 358 - x_358 = [7.00e-05 3.44e-03], p_k = [-0.01323 -0.00689], α_k = 0.00781
Iteration: 359 - x_359 = [-4.00e-05 3.39e-03], p_k = [ 0.00744 -0.00678], α_k = 0.01562
Iteration: 360 - x_360 = [8.00e-05 3.28e-03], p_k = [-0.01581 -0.00657], α_k = 0.00781
Iteration: 361 - x_361 = [-4.00e-05 3.23e-03], p_k = [ 0.00889 -0.00646], α_k = 0.00781
Iteration: 362 - x_362 = [3.00e-05 3.18e-03], p_k = [-0.005 -0.00636], α_k = 0.01562
Iteration: 363 - x_363 = [-5.00e-05 3.08e-03], p_k = [ 0.01063 -0.00616], α_k = 0.00781
Iteration: 364 - x_364 = [3.00e-05 3.03e-03], p_k = [-0.00598 -0.00607], α_k = 0.01562
Iteration: 365 - x_365 = [-6.00e-05 2.94e-03], p_k = [ 0.01271 -0.00588], α_k = 0.00781
Iteration: 366 - x_366 = [4.00e-05 2.89e-03], p_k = [-0.00715 -0.00579], α_k = 0.01562
Iteration: 367 - x_367 = [-8.0e-05 2.8e-03], p_k = [ 0.01519 -0.00561], α_k = 0.00781
Iteration: 368 - x_368 = [4.00e-05 2.76e-03], p_k = [-0.00854 -0.00552], α_k = 0.00781
Iteration: 369 - x_369 = [-2.00e-05 2.72e-03], p_k = [ 0.00481 -0.00543], α_k = 0.01562
Iteration: 370 - x_370 = [5.00e-05 2.63e-03], p_k = [-0.01021 -0.00526], α_k = 0.00781
Iteration: 371 - x_371 = [-3.00e-05 2.59e-03], p_k = [ 0.00574 -0.00518], α_k = 0.01562
Iteration: 372 - x_372 = [6.00e-05 2.51e-03], p_k = [-0.01221 -0.00502], α_k = 0.00781
Iteration: 373 - x_373 = [-3.00e-05 2.47e-03], p_k = [ 0.00687 -0.00494], α_k = 0.00781
Iteration: 374 - x_374 = [2.00e-05 2.43e-03], p_k = [-0.00386 -0.00486], α_k = 0.01562
Iteration: 375 - x_375 = [-4.00e-05 2.36e-03], p_k = [ 0.00821 -0.00471], α_k = 0.00781
Iteration: 376 - x_376 = [2.00e-05 2.32e-03], p_k = [-0.00462 -0.00464], α_k = 0.01562
Iteration: 377 - x_377 = [-5.00e-05 2.25e-03], p_k = [ 0.00981 -0.00449], α_k = 0.00781
Iteration: 378 - x_378 = [3.00e-05 2.21e-03], p_k = [-0.00552 -0.00442], α_k = 0.01562
Iteration: 379 - x_379 = [-6.00e-05 2.14e-03], p_k = [ 0.01172 -0.00428], α_k = 0.00781
Iteration: 380 - x_380 = [3.00e-05 2.11e-03], p_k = [-0.0066 -0.00422], α_k = 0.00781
Iteration: 381 - x_381 = [-2.00e-05 2.08e-03], p_k = [ 0.00371 -0.00415], α_k = 0.01562
Iteration: 382 - x_382 = [4.00e-05 2.01e-03], p_k = [-0.00788 -0.00402], α_k = 0.00781
Iteration: 383 - x_383 = [-2.00e-05 1.98e-03], p_k = [ 0.00443 -0.00396], α_k = 0.01562
Iteration: 384 - x_384 = [5.00e-05 1.92e-03], p_k = [-0.00942 -0.00383], α_k = 0.00781
Iteration: 385 - x_385 = [-3.00e-05 1.89e-03], p_k = [ 0.0053 -0.00377], α_k = 0.00781
Iteration: 386 - x_386 = [1.00e-05 1.86e-03], p_k = [-0.00298 -0.00372], α_k = 0.01562
Iteration: 387 - x_387 = [-3.0e-05 1.8e-03], p_k = [ 0.00634 -0.0036 ], α_k = 0.00781
Iteration: 388 - x_388 = [2.00e-05 1.77e-03], p_k = [-0.00356 -0.00354], α_k = 0.01562
Iteration: 389 - x_389 = [-4.00e-05 1.72e-03], p_k = [ 0.00757 -0.00343], α_k = 0.00781
Iteration: 390 - x_390 = [2.00e-05 1.69e-03], p_k = [-0.00426 -0.00338], α_k = 0.01562
Iteration: 391 - x_391 = [-5.00e-05 1.64e-03], p_k = [ 0.00905 -0.00327], α_k = 0.00781
Iteration: 392 - x_392 = [3.00e-05 1.61e-03], p_k = [-0.00509 -0.00322], α_k = 0.00781
Iteration: 393 - x_393 = [-1.00e-05 1.59e-03], p_k = [ 0.00286 -0.00317], α_k = 0.01562
Iteration: 394 - x_394 = [3.00e-05 1.54e-03], p_k = [-0.00609 -0.00307], α_k = 0.00781
Iteration: 395 - x_395 = [-2.00e-05 1.51e-03], p_k = [ 0.00342 -0.00302], α_k = 0.01562
Iteration: 396 - x_396 = [4.00e-05 1.47e-03], p_k = [-0.00728 -0.00293], α_k = 0.00781
Iteration: 397 - x_397 = [-2.00e-05 1.44e-03], p_k = [ 0.00409 -0.00288], α_k = 0.00781
Iteration: 398 - x_398 = [1.00e-05 1.42e-03], p_k = [-0.0023 -0.00284], α_k = 0.01562
Iteration: 399 - x_399 = [-2.00e-05 1.38e-03], p_k = [ 0.00489 -0.00275], α_k = 0.00781
Iteration: 400 - x_400 = [1.00e-05 1.35e-03], p_k = [-0.00275 -0.00271], α_k = 0.01562
Iteration: 401 - x_401 = [-3.00e-05 1.31e-03], p_k = [ 0.00585 -0.00262], α_k = 0.00781
Iteration: 402 - x_402 = [2.00e-05 1.29e-03], p_k = [-0.00329 -0.00258], α_k = 0.01562
Iteration: 403 - x_403 = [-3.00e-05 1.25e-03], p_k = [ 0.00699 -0.0025 ], α_k = 0.00781
Iteration: 404 - x_404 = [2.00e-05 1.23e-03], p_k = [-0.00393 -0.00246], α_k = 0.00781
Iteration: 405 - x_405 = [-1.00e-05 1.21e-03], p_k = [ 0.00221 -0.00242], α_k = 0.01562
Iteration: 406 - x_406 = [2.00e-05 1.17e-03], p_k = [-0.0047 -0.00235], α_k = 0.00781
Iteration: 407 - x_407 = [-1.00e-05 1.16e-03], p_k = [ 0.00264 -0.00231], α_k = 0.01562
Iteration: 408 - x_408 = [3.00e-05 1.12e-03], p_k = [-0.00562 -0.00224], α_k = 0.00781
Iteration: 409 - x_409 = [-2.0e-05 1.1e-03], p_k = [ 0.00316 -0.0022 ], α_k = 0.00781
Iteration: 410 - x_410 = [1.00e-05 1.08e-03], p_k = [-0.00178 -0.00217], α_k = 0.01562
Iteration: 411 - x_411 = [-2.00e-05 1.05e-03], p_k = [ 0.00378 -0.0021 ], α_k = 0.00781
Iteration: 412 - x_412 = [1.00e-05 1.03e-03], p_k = [-0.00212 -0.00207], α_k = 0.01562
Iteration: 413 - x_413 = [-2.e-05 1.e-03], p_k = [ 0.00451 -0.002 ], α_k = 0.00781
Iteration: 414 - x_414 = [1.0e-05 9.9e-04], p_k = [-0.00254 -0.00197], α_k = 0.01562
Iteration: 415 - x_415 = [-3.0e-05 9.6e-04], p_k = [ 0.0054 -0.00191], α_k = 0.00781
Iteration: 416 - x_416 = [2.0e-05 9.4e-04], p_k = [-0.00304 -0.00188], α_k = 0.00781
Iteration: 417 - x_417 = [-1.0e-05 9.3e-04], p_k = [ 0.00171 -0.00185], α_k = 0.01562
Iteration: 418 - x_418 = [2.e-05 9.e-04], p_k = [-0.00363 -0.00179], α_k = 0.00781
Iteration: 419 - x_419 = [-1.0e-05 8.8e-04], p_k = [ 0.00204 -0.00177], α_k = 0.01562
Iteration: 420 - x_420 = [2.0e-05 8.6e-04], p_k = [-0.00434 -0.00171], α_k = 0.00781
Iteration: 421 - x_421 = [-1.0e-05 8.4e-04], p_k = [ 0.00244 -0.00168], α_k = 0.00781
Iteration: 422 - x_422 = [1.0e-05 8.3e-04], p_k = [-0.00137 -0.00166], α_k = 0.01562
Iteration: 423 - x_423 = [-1.e-05 8.e-04], p_k = [ 0.00292 -0.00161], α_k = 0.00781
Iteration: 424 - x_424 = [1.0e-05 7.9e-04], p_k = [-0.00164 -0.00158], α_k = 0.01562
Iteration: 425 - x_425 = [-2.0e-05 7.7e-04], p_k = [ 0.00349 -0.00153], α_k = 0.00781
Iteration: 426 - x_426 = [1.0e-05 7.5e-04], p_k = [-0.00196 -0.00151], α_k = 0.01562
Iteration: 427 - x_427 = [-2.0e-05 7.3e-04], p_k = [ 0.00417 -0.00146], α_k = 0.00781
Iteration: 428 - x_428 = [1.0e-05 7.2e-04], p_k = [-0.00234 -0.00144], α_k = 0.00781
Iteration: 429 - x_429 = [-1.0e-05 7.1e-04], p_k = [ 0.00132 -0.00142], α_k = 0.01562
Iteration: 430 - x_430 = [1.0e-05 6.9e-04], p_k = [-0.0028 -0.00137], α_k = 0.00781
Iteration: 431 - x_431 = [-1.0e-05 6.7e-04], p_k = [ 0.00158 -0.00135], α_k = 0.01562
Iteration: 432 - x_432 = [2.0e-05 6.5e-04], p_k = [-0.00335 -0.00131], α_k = 0.00781
Iteration: 433 - x_433 = [-1.0e-05 6.4e-04], p_k = [ 0.00188 -0.00129], α_k = 0.00781
Iteration: 434 - x_434 = [1.0e-05 6.3e-04], p_k = [-0.00106 -0.00127], α_k = 0.01562
Iteration: 435 - x_435 = [-1.0e-05 6.1e-04], p_k = [ 0.00225 -0.00123], α_k = 0.00781
Iteration: 436 - x_436 = [1.e-05 6.e-04], p_k = [-0.00127 -0.00121], α_k = 0.01562
Iteration: 437 - x_437 = [-1.0e-05 5.9e-04], p_k = [ 0.00269 -0.00117], α_k = 0.00781
Iteration: 438 - x_438 = [1.0e-05 5.8e-04], p_k = [-0.00151 -0.00115], α_k = 0.01562
Iteration: 439 - x_439 = [-2.0e-05 5.6e-04], p_k = [ 0.00322 -0.00112], α_k = 0.00781
Iteration: 440 - x_440 = [1.0e-05 5.5e-04], p_k = [-0.00181 -0.0011 ], α_k = 0.00781
Iteration: 441 - x_441 = [-1.0e-05 5.4e-04], p_k = [ 0.00102 -0.00108], α_k = 0.01562
Iteration: 442 - x_442 = [1.0e-05 5.2e-04], p_k = [-0.00216 -0.00105], α_k = 0.00781
Iteration: 443 - x_443 = [-1.0e-05 5.2e-04], p_k = [ 0.00122 -0.00103], α_k = 0.01562
Iteration: 444 - x_444 = [1.e-05 5.e-04], p_k = [-0.00258 -0.001 ], α_k = 0.00781
Iteration: 445 - x_445 = [-1.0e-05 4.9e-04], p_k = [ 0.00145 -0.00098], α_k = 0.00781
Iteration: 446 - x_446 = [0. 0.00048], p_k = [-0.00082 -0.00097], α_k = 0.01562
Iteration: 447 - x_447 = [-1.0e-05 4.7e-04], p_k = [ 0.00174 -0.00094], α_k = 0.00781
Iteration: 448 - x_448 = [0. 0.00046], p_k = [-0.00098 -0.00092], α_k = 0.01562
Iteration: 449 - x_449 = [-1.0e-05 4.5e-04], p_k = [ 0.00208 -0.00089], α_k = 0.00781
Iteration: 450 - x_450 = [1.0e-05 4.4e-04], p_k = [-0.00117 -0.00088], α_k = 0.00781
Iteration: 451 - x_451 = [-0. 0.00043], p_k = [ 0.00066 -0.00087], α_k = 0.01562
Iteration: 452 - x_452 = [1.0e-05 4.2e-04], p_k = [-0.0014 -0.00084], α_k = 0.00781
Iteration: 453 - x_453 = [-0. 0.00041], p_k = [ 0.00079 -0.00083], α_k = 0.01562
Iteration: 454 - x_454 = [1.e-05 4.e-04], p_k = [-0.00167 -0.0008 ], α_k = 0.00781
Iteration: 455 - x_455 = [-0. 0.00039], p_k = [ 0.00094 -0.00079], α_k = 0.01562
Iteration: 456 - x_456 = [1.0e-05 3.8e-04], p_k = [-0.002 -0.00076], α_k = 0.00781
Iteration: 457 - x_457 = [-1.0e-05 3.8e-04], p_k = [ 0.00112 -0.00075], α_k = 0.00781
Iteration: 458 - x_458 = [0. 0.00037], p_k = [-0.00063 -0.00074], α_k = 0.01562
Iteration: 459 - x_459 = [-1.0e-05 3.6e-04], p_k = [ 0.00134 -0.00072], α_k = 0.00781
Iteration: 460 - x_460 = [0. 0.00035], p_k = [-0.00075 -0.00071], α_k = 0.01562
Iteration: 461 - x_461 = [-1.0e-05 3.4e-04], p_k = [ 0.0016 -0.00068], α_k = 0.00781
Iteration: 462 - x_462 = [0. 0.00034], p_k = [-0.0009 -0.00067], α_k = 0.00781
Iteration: 463 - x_463 = [-0. 0.00033], p_k = [ 0.00051 -0.00066], α_k = 0.01562
Iteration: 464 - x_464 = [1.0e-05 3.2e-04], p_k = [-0.00108 -0.00064], α_k = 0.00781
Iteration: 465 - x_465 = [-0. 0.00032], p_k = [ 0.00061 -0.00063], α_k = 0.01562
Iteration: 466 - x_466 = [1.0e-05 3.1e-04], p_k = [-0.00129 -0.00061], α_k = 0.00781
Iteration: 467 - x_467 = [-0. 0.0003], p_k = [ 0.00073 -0.0006 ], α_k = 0.01562
Iteration: 468 - x_468 = [1.0e-05 2.9e-04], p_k = [-0.00154 -0.00058], α_k = 0.00781
Iteration: 469 - x_469 = [-0. 0.00029], p_k = [ 0.00087 -0.00057], α_k = 0.00781
Iteration: 470 - x_470 = [0. 0.00028], p_k = [-0.00049 -0.00057], α_k = 0.01562
Iteration: 471 - x_471 = [-1.0e-05 2.7e-04], p_k = [ 0.00104 -0.00055], α_k = 0.00781
Iteration: 472 - x_472 = [0. 0.00027], p_k = [-0.00058 -0.00054], α_k = 0.01562
Iteration: 473 - x_473 = [-1.0e-05 2.6e-04], p_k = [ 0.00124 -0.00052], α_k = 0.00781
Iteration: 474 - x_474 = [0. 0.00026], p_k = [-0.0007 -0.00051], α_k = 0.00781
Iteration: 475 - x_475 = [-0. 0.00025], p_k = [ 0.00039 -0.00051], α_k = 0.01562
Iteration: 476 - x_476 = [0. 0.00025], p_k = [-0.00083 -0.00049], α_k = 0.00781
Iteration: 477 - x_477 = [-0. 0.00024], p_k = [ 0.00047 -0.00048], α_k = 0.01562
Iteration: 478 - x_478 = [0. 0.00023], p_k = [-0.001 -0.00047], α_k = 0.00781
Iteration: 479 - x_479 = [-0. 0.00023], p_k = [ 0.00056 -0.00046], α_k = 0.01562
Iteration: 480 - x_480 = [1.0e-05 2.2e-04], p_k = [-0.00119 -0.00045], α_k = 0.00781
Iteration: 481 - x_481 = [-0. 0.00022], p_k = [ 0.00067 -0.00044], α_k = 0.00781
Iteration: 482 - x_482 = [0. 0.00022], p_k = [-0.00038 -0.00043], α_k = 0.01562
Iteration: 483 - x_483 = [-0. 0.00021], p_k = [ 0.0008 -0.00042], α_k = 0.00781
Iteration: 484 - x_484 = [0. 0.00021], p_k = [-0.00045 -0.00041], α_k = 0.01562
Iteration: 485 - x_485 = [-0. 0.0002], p_k = [ 0.00096 -0.0004 ], α_k = 0.00781
Iteration: 486 - x_486 = [0. 0.0002], p_k = [-0.00054 -0.00039], α_k = 0.00781
Iteration: 487 - x_487 = [-0. 0.00019], p_k = [ 0.0003 -0.00039], α_k = 0.01562
Iteration: 488 - x_488 = [0. 0.00019], p_k = [-0.00064 -0.00037], α_k = 0.00781
Iteration: 489 - x_489 = [-0. 0.00018], p_k = [ 0.00036 -0.00037], α_k = 0.01562
Iteration: 490 - x_490 = [0. 0.00018], p_k = [-0.00077 -0.00036], α_k = 0.00781
Iteration: 491 - x_491 = [-0. 0.00018], p_k = [ 0.00043 -0.00035], α_k = 0.01562
Iteration: 492 - x_492 = [0. 0.00017], p_k = [-0.00092 -0.00034], α_k = 0.00781
Iteration: 493 - x_493 = [-0. 0.00017], p_k = [ 0.00052 -0.00034], α_k = 0.00781
Iteration: 494 - x_494 = [0. 0.00017], p_k = [-0.00029 -0.00033], α_k = 0.01562
Iteration: 495 - x_495 = [-0. 0.00016], p_k = [ 0.00062 -0.00032], α_k = 0.00781
Iteration: 496 - x_496 = [0. 0.00016], p_k = [-0.00035 -0.00031], α_k = 0.01562
Iteration: 497 - x_497 = [-0. 0.00015], p_k = [ 0.00074 -0.0003 ], α_k = 0.00781
Iteration: 498 - x_498 = [0. 0.00015], p_k = [-0.00042 -0.0003 ], α_k = 0.00781
Iteration: 499 - x_499 = [-0. 0.00015], p_k = [ 0.00023 -0.0003 ], α_k = 0.01562
Iteration: 500 - x_500 = [0. 0.00014], p_k = [-0.0005 -0.00029], α_k = 0.00781
Iteration: 501 - x_501 = [-0. 0.00014], p_k = [ 0.00028 -0.00028], α_k = 0.01562
Iteration: 502 - x_502 = [0. 0.00014], p_k = [-0.00059 -0.00027], α_k = 0.00781
Iteration: 503 - x_503 = [-0. 0.00013], p_k = [ 0.00033 -0.00027], α_k = 0.01562
Iteration: 504 - x_504 = [0. 0.00013], p_k = [-0.00071 -0.00026], α_k = 0.00781
Iteration: 505 - x_505 = [-0. 0.00013], p_k = [ 0.0004 -0.00026], α_k = 0.00781
Iteration: 506 - x_506 = [0. 0.00013], p_k = [-0.00022 -0.00025], α_k = 0.01562
Iteration: 507 - x_507 = [-0. 0.00012], p_k = [ 0.00048 -0.00024], α_k = 0.00781
Iteration: 508 - x_508 = [0. 0.00012], p_k = [-0.00027 -0.00024], α_k = 0.01562
Iteration: 509 - x_509 = [-0. 0.00012], p_k = [ 0.00057 -0.00023], α_k = 0.00781
Iteration: 510 - x_510 = [0. 0.00011], p_k = [-0.00032 -0.00023], α_k = 0.00781
Iteration: 511 - x_511 = [-0. 0.00011], p_k = [ 0.00018 -0.00023], α_k = 0.01562
Iteration: 512 - x_512 = [0. 0.00011], p_k = [-0.00038 -0.00022], α_k = 0.00781
Iteration: 513 - x_513 = [-0. 0.00011], p_k = [ 0.00022 -0.00022], α_k = 0.01562
Iteration: 514 - x_514 = [0. 0.0001], p_k = [-0.00046 -0.00021], α_k = 0.00781
Iteration: 515 - x_515 = [-0. 0.0001], p_k = [ 0.00026 -0.00021], α_k = 0.01562
Iteration: 516 - x_516 = [0. 0.0001], p_k = [-0.00055 -0.0002 ], α_k = 0.00781
Iteration: 517 - x_517 = [-0. 0.0001], p_k = [ 0.00031 -0.0002 ], α_k = 0.00781
Iteration: 518 - x_518 = [0. 0.0001], p_k = [-0.00017 -0.00019], α_k = 0.01562
Iteration: 519 - x_519 = [-0.e+00 9.e-05], p_k = [ 0.00037 -0.00019], α_k = 0.00781
Iteration: 520 - x_520 = [0.e+00 9.e-05], p_k = [-0.00021 -0.00018], α_k = 0.01562
Iteration: 521 - x_521 = [-0.e+00 9.e-05], p_k = [ 0.00044 -0.00018], α_k = 0.00781
Iteration: 522 - x_522 = [0.e+00 9.e-05], p_k = [-0.00025 -0.00018], α_k = 0.00781
Iteration: 523 - x_523 = [-0.e+00 9.e-05], p_k = [ 0.00014 -0.00017], α_k = 0.01562
Iteration: 524 - x_524 = [0.e+00 8.e-05], p_k = [-0.0003 -0.00017], α_k = 0.00781
Iteration: 525 - x_525 = [-0.e+00 8.e-05], p_k = [ 0.00017 -0.00016], α_k = 0.01562
Iteration: 526 - x_526 = [0.e+00 8.e-05], p_k = [-0.00035 -0.00016], α_k = 0.00781
Iteration: 527 - x_527 = [-0.e+00 8.e-05], p_k = [ 0.0002 -0.00016], α_k = 0.01562
Iteration: 528 - x_528 = [0.e+00 8.e-05], p_k = [-0.00042 -0.00015], α_k = 0.00781
Iteration: 529 - x_529 = [-0.e+00 7.e-05], p_k = [ 0.00024 -0.00015], α_k = 0.00781
Iteration: 530 - x_530 = [0.e+00 7.e-05], p_k = [-0.00013 -0.00015], α_k = 0.01562
Iteration: 531 - x_531 = [-0.e+00 7.e-05], p_k = [ 0.00028 -0.00014], α_k = 0.00781
Iteration: 532 - x_532 = [0.e+00 7.e-05], p_k = [-0.00016 -0.00014], α_k = 0.01562
Iteration: 533 - x_533 = [-0.e+00 7.e-05], p_k = [ 0.00034 -0.00014], α_k = 0.00781
Iteration: 534 - x_534 = [0.e+00 7.e-05], p_k = [-0.00019 -0.00013], α_k = 0.00781
Iteration: 535 - x_535 = [-0.e+00 7.e-05], p_k = [ 0.00011 -0.00013], α_k = 0.01562
Iteration: 536 - x_536 = [0.e+00 6.e-05], p_k = [-0.00023 -0.00013], α_k = 0.00781
Iteration: 537 - x_537 = [-0.e+00 6.e-05], p_k = [ 0.00013 -0.00013], α_k = 0.01562
Iteration: 538 - x_538 = [0.e+00 6.e-05], p_k = [-0.00027 -0.00012], α_k = 0.00781
Iteration: 539 - x_539 = [-0.e+00 6.e-05], p_k = [ 0.00015 -0.00012], α_k = 0.01562
Iteration: 540 - x_540 = [0.e+00 6.e-05], p_k = [-0.00033 -0.00012], α_k = 0.00781
Iteration: 541 - x_541 = [-0.e+00 6.e-05], p_k = [ 0.00018 -0.00011], α_k = 0.00781
Iteration: 542 - x_542 = [0.e+00 6.e-05], p_k = [-0.0001 -0.00011], α_k = 0.01562
Iteration: 543 - x_543 = [-0.e+00 5.e-05], p_k = [ 0.00022 -0.00011], α_k = 0.00781
Iteration: 544 - x_544 = [0.e+00 5.e-05], p_k = [-0.00012 -0.00011], α_k = 0.01562
Iteration: 545 - x_545 = [-0.e+00 5.e-05], p_k = [ 0.00026 -0.0001 ], α_k = 0.00781
Iteration: 546 - x_546 = [0.e+00 5.e-05], p_k = [-0.00015 -0.0001 ], α_k = 0.00781
Iteration: 547 - x_547 = [-0.e+00 5.e-05], p_k = [ 8.e-05 -1.e-04], α_k = 0.01562
Iteration: 548 - x_548 = [0.e+00 5.e-05], p_k = [-0.00018 -0.0001 ], α_k = 0.00781
Iteration: 549 - x_549 = [-0.e+00 5.e-05], p_k = [ 0.0001 -0.0001], α_k = 0.01562
Iteration: 550 - x_550 = [0.e+00 5.e-05], p_k = [-2.1e-04 -9.0e-05], α_k = 0.00781
Iteration: 551 - x_551 = [-0.e+00 5.e-05], p_k = [ 1.2e-04 -9.0e-05], α_k = 0.01562
Iteration: 552 - x_552 = [0.e+00 4.e-05], p_k = [-2.5e-04 -9.0e-05], α_k = 0.00781
Iteration: 553 - x_553 = [-0.e+00 4.e-05], p_k = [ 1.4e-04 -9.0e-05], α_k = 0.00781
Iteration: 554 - x_554 = [0.e+00 4.e-05], p_k = [-8.e-05 -9.e-05], α_k = 0.01562
Iteration: 555 - x_555 = [-0.e+00 4.e-05], p_k = [ 1.7e-04 -8.0e-05], α_k = 0.00781
Iteration: 556 - x_556 = [0.e+00 4.e-05], p_k = [-1.e-04 -8.e-05], α_k = 0.01562
Iteration: 557 - x_557 = [-0.e+00 4.e-05], p_k = [ 2.e-04 -8.e-05], α_k = 0.00781
Iteration: 558 - x_558 = [0.e+00 4.e-05], p_k = [-1.1e-04 -8.0e-05], α_k = 0.00781
Iteration: 559 - x_559 = [-0.e+00 4.e-05], p_k = [ 6.e-05 -8.e-05], α_k = 0.01562
Iteration: 560 - x_560 = [0.e+00 4.e-05], p_k = [-1.4e-04 -7.0e-05], α_k = 0.00781
Iteration: 561 - x_561 = [-0.e+00 4.e-05], p_k = [ 8.e-05 -7.e-05], α_k = 0.01562
Iteration: 562 - x_562 = [0.e+00 4.e-05], p_k = [-1.6e-04 -7.0e-05], α_k = 0.00781
Iteration: 563 - x_563 = [-0.e+00 4.e-05], p_k = [ 9.e-05 -7.e-05], α_k = 0.01562
Iteration: 564 - x_564 = [0.e+00 3.e-05], p_k = [-1.9e-04 -7.0e-05], α_k = 0.00781
Iteration: 565 - x_565 = [-0.e+00 3.e-05], p_k = [ 1.1e-04 -7.0e-05], α_k = 0.00781
Iteration: 566 - x_566 = [0.e+00 3.e-05], p_k = [-6.e-05 -7.e-05], α_k = 0.01562
Iteration: 567 - x_567 = [-0.e+00 3.e-05], p_k = [ 1.3e-04 -6.0e-05], α_k = 0.00781
Iteration: 568 - x_568 = [0.e+00 3.e-05], p_k = [-7.e-05 -6.e-05], α_k = 0.01562
Iteration: 569 - x_569 = [-0.e+00 3.e-05], p_k = [ 1.6e-04 -6.0e-05], α_k = 0.00781
Iteration: 570 - x_570 = [0.e+00 3.e-05], p_k = [-9.e-05 -6.e-05], α_k = 0.00781
Iteration: 571 - x_571 = [-0.e+00 3.e-05], p_k = [ 5.e-05 -6.e-05], α_k = 0.01562
Iteration: 572 - x_572 = [0.e+00 3.e-05], p_k = [-1.1e-04 -6.0e-05], α_k = 0.00781
Iteration: 573 - x_573 = [-0.e+00 3.e-05], p_k = [ 6.e-05 -6.e-05], α_k = 0.01562
Iteration: 574 - x_574 = [0.e+00 3.e-05], p_k = [-1.3e-04 -5.0e-05], α_k = 0.00781
Iteration: 575 - x_575 = [-0.e+00 3.e-05], p_k = [ 7.e-05 -5.e-05], α_k = 0.01562
Iteration: 576 - x_576 = [0.e+00 3.e-05], p_k = [-1.5e-04 -5.0e-05], α_k = 0.00781
Iteration: 577 - x_577 = [-0.e+00 3.e-05], p_k = [ 8.e-05 -5.e-05], α_k = 0.00781
Iteration: 578 - x_578 = [0.e+00 3.e-05], p_k = [-5.e-05 -5.e-05], α_k = 0.01562
Iteration: 579 - x_579 = [-0.e+00 2.e-05], p_k = [ 1.e-04 -5.e-05], α_k = 0.00781
Iteration: 580 - x_580 = [0.e+00 2.e-05], p_k = [-6.e-05 -5.e-05], α_k = 0.01562
Iteration: 581 - x_581 = [-0.e+00 2.e-05], p_k = [ 1.2e-04 -5.0e-05], α_k = 0.00781
Iteration: 582 - x_582 = [0.e+00 2.e-05], p_k = [-7.e-05 -5.e-05], α_k = 0.00781
Iteration: 583 - x_583 = [-0.e+00 2.e-05], p_k = [ 4.e-05 -4.e-05], α_k = 0.01562
Iteration: 584 - x_584 = [0.e+00 2.e-05], p_k = [-8.e-05 -4.e-05], α_k = 0.00781
Iteration: 585 - x_585 = [-0.e+00 2.e-05], p_k = [ 5.e-05 -4.e-05], α_k = 0.01562
Iteration: 586 - x_586 = [0.e+00 2.e-05], p_k = [-1.e-04 -4.e-05], α_k = 0.00781
Iteration: 587 - x_587 = [-0.e+00 2.e-05], p_k = [ 5.e-05 -4.e-05], α_k = 0.00781
Iteration: 588 - x_588 = [0.e+00 2.e-05], p_k = [-3.e-05 -4.e-05], α_k = 0.01562
Iteration: 589 - x_589 = [-0.e+00 2.e-05], p_k = [ 7.e-05 -4.e-05], α_k = 0.00781
Iteration: 590 - x_590 = [0.e+00 2.e-05], p_k = [-4.e-05 -4.e-05], α_k = 0.01562
Iteration: 591 - x_591 = [-0.e+00 2.e-05], p_k = [ 8.e-05 -4.e-05], α_k = 0.00781
Iteration: 592 - x_592 = [0.e+00 2.e-05], p_k = [-4.e-05 -4.e-05], α_k = 0.01562
Iteration: 593 - x_593 = [-0.e+00 2.e-05], p_k = [ 9.e-05 -4.e-05], α_k = 0.00781
Iteration: 594 - x_594 = [0.e+00 2.e-05], p_k = [-5.e-05 -3.e-05], α_k = 0.00781
Iteration: 595 - x_595 = [-0.e+00 2.e-05], p_k = [ 3.e-05 -3.e-05], α_k = 0.01562
Iteration: 596 - x_596 = [0.e+00 2.e-05], p_k = [-6.e-05 -3.e-05], α_k = 0.00781
Iteration: 597 - x_597 = [-0.e+00 2.e-05], p_k = [ 4.e-05 -3.e-05], α_k = 0.01562
Iteration: 598 - x_598 = [0.e+00 2.e-05], p_k = [-7.e-05 -3.e-05], α_k = 0.00781
Iteration: 599 - x_599 = [-0.e+00 2.e-05], p_k = [ 4.e-05 -3.e-05], α_k = 0.00781
Iteration: 600 - x_600 = [0.e+00 2.e-05], p_k = [-2.e-05 -3.e-05], α_k = 0.01562
Iteration: 601 - x_601 = [-0.e+00 1.e-05], p_k = [ 5.e-05 -3.e-05], α_k = 0.00781
Iteration: 602 - x_602 = [0.e+00 1.e-05], p_k = [-3.e-05 -3.e-05], α_k = 0.01562
Iteration: 603 - x_603 = [-0.e+00 1.e-05], p_k = [ 6.e-05 -3.e-05], α_k = 0.00781
Iteration: 604 - x_604 = [0.e+00 1.e-05], p_k = [-3.e-05 -3.e-05], α_k = 0.01562
Iteration: 605 - x_605 = [-0.e+00 1.e-05], p_k = [ 7.e-05 -3.e-05], α_k = 0.00781
Iteration: 606 - x_606 = [0.e+00 1.e-05], p_k = [-4.e-05 -3.e-05], α_k = 0.00781
Iteration: 607 - x_607 = [-0.e+00 1.e-05], p_k = [ 2.e-05 -3.e-05], α_k = 0.01562
Iteration: 608 - x_608 = [0.e+00 1.e-05], p_k = [-5.e-05 -3.e-05], α_k = 0.00781
Iteration: 609 - x_609 = [-0.e+00 1.e-05], p_k = [ 3.e-05 -3.e-05], α_k = 0.01562
Iteration: 610 - x_610 = [0.e+00 1.e-05], p_k = [-6.e-05 -2.e-05], α_k = 0.00781
Iteration: 611 - x_611 = [-0.e+00 1.e-05], p_k = [ 3.e-05 -2.e-05], α_k = 0.00781
Iteration: 612 - x_612 = [0.e+00 1.e-05], p_k = [-2.e-05 -2.e-05], α_k = 0.01562
Iteration: 613 - x_613 = [-0.e+00 1.e-05], p_k = [ 4.e-05 -2.e-05], α_k = 0.00781
Iteration: 614 - x_614 = [0.e+00 1.e-05], p_k = [-2.e-05 -2.e-05], α_k = 0.01562
Iteration: 615 - x_615 = [-0.e+00 1.e-05], p_k = [ 5.e-05 -2.e-05], α_k = 0.00781
Iteration: 616 - x_616 = [0.e+00 1.e-05], p_k = [-3.e-05 -2.e-05], α_k = 0.01562
Iteration: 617 - x_617 = [-0.e+00 1.e-05], p_k = [ 6.e-05 -2.e-05], α_k = 0.00781
Iteration: 618 - x_618 = [0.e+00 1.e-05], p_k = [-3.e-05 -2.e-05], α_k = 0.00781
Iteration: 619 - x_619 = [-0.e+00 1.e-05], p_k = [ 2.e-05 -2.e-05], α_k = 0.01562
Iteration: 620 - x_620 = [0.e+00 1.e-05], p_k = [-4.e-05 -2.e-05], α_k = 0.00781
Iteration: 621 - x_621 = [-0.e+00 1.e-05], p_k = [ 2.e-05 -2.e-05], α_k = 0.01562
Iteration: 622 - x_622 = [0.e+00 1.e-05], p_k = [-4.e-05 -2.e-05], α_k = 0.00781
Iteration: 623 - x_623 = [-0.e+00 1.e-05], p_k = [ 3.e-05 -2.e-05], α_k = 0.00781
Iteration: 624 - x_624 = [0.e+00 1.e-05], p_k = [-1.e-05 -2.e-05], α_k = 0.01562
Iteration: 625 - x_625 = [-0.e+00 1.e-05], p_k = [ 3.e-05 -2.e-05], α_k = 0.00781
Iteration: 626 - x_626 = [0.e+00 1.e-05], p_k = [-2.e-05 -2.e-05], α_k = 0.01562
Iteration: 627 - x_627 = [-0.e+00 1.e-05], p_k = [ 4.e-05 -2.e-05], α_k = 0.00781
Iteration: 628 - x_628 = [0.e+00 1.e-05], p_k = [-2.e-05 -2.e-05], α_k = 0.01562
Iteration: 629 - x_629 = [-0.e+00 1.e-05], p_k = [ 4.e-05 -2.e-05], α_k = 0.00781
Iteration: 630 - x_630 = [0.e+00 1.e-05], p_k = [-2.e-05 -2.e-05], α_k = 0.00781
Iteration: 631 - x_631 = [-0.e+00 1.e-05], p_k = [ 1.e-05 -2.e-05], α_k = 0.01562
Iteration: 632 - x_632 = [0.e+00 1.e-05], p_k = [-3.e-05 -1.e-05], α_k = 0.00781
Iteration: 633 - x_633 = [-0.e+00 1.e-05], p_k = [ 2.e-05 -1.e-05], α_k = 0.01562
Iteration: 634 - x_634 = [0.e+00 1.e-05], p_k = [-3.e-05 -1.e-05], α_k = 0.00781
Iteration: 635 - x_635 = [-0.e+00 1.e-05], p_k = [ 2.e-05 -1.e-05], α_k = 0.00781
Iteration: 636 - x_636 = [0.e+00 1.e-05], p_k = [-1.e-05 -1.e-05], α_k = 0.01562
Iteration: 637 - x_637 = [-0.e+00 1.e-05], p_k = [ 2.e-05 -1.e-05], α_k = 0.00781
Iteration: 638 - x_638 = [0.e+00 1.e-05], p_k = [-1.e-05 -1.e-05], α_k = 0.01562
Iteration: 639 - x_639 = [-0.e+00 1.e-05], p_k = [ 3.e-05 -1.e-05], α_k = 0.00781
Iteration: 640 - x_640 = [0.e+00 1.e-05], p_k = [-2.e-05 -1.e-05], α_k = 0.01562
Iteration: 641 - x_641 = [-0.e+00 1.e-05], p_k = [ 3.e-05 -1.e-05], α_k = 0.00781
Iteration: 642 - x_642 = [0.e+00 1.e-05], p_k = [-2.e-05 -1.e-05], α_k = 0.00781
Iteration: 643 - x_643 = [-0.e+00 1.e-05], p_k = [ 1.e-05 -1.e-05], α_k = 0.01562
Iteration: 644 - x_644 = [0.e+00 1.e-05], p_k = [-2.e-05 -1.e-05], α_k = 0.00781
Iteration: 645 - x_645 = [-0.e+00 1.e-05], p_k = [ 1.e-05 -1.e-05], α_k = 0.01562
Iteration: 646 - x_646 = [0.e+00 1.e-05], p_k = [-3.e-05 -1.e-05], α_k = 0.00781
Iteration: 647 - x_647 = [-0.e+00 1.e-05], p_k = [ 1.e-05 -1.e-05], α_k = 0.00781
Iteration: 648 - x_648 = [0.e+00 1.e-05], p_k = [-1.e-05 -1.e-05], α_k = 0.01562
Iteration: 649 - x_649 = [-0.e+00 1.e-05], p_k = [ 2.e-05 -1.e-05], α_k = 0.00781
Iteration: 650 - x_650 = [0.e+00 1.e-05], p_k = [-1.e-05 -1.e-05], α_k = 0.01562
Iteration: 651 - x_651 = [-0. 0.], p_k = [ 2.e-05 -1.e-05], α_k = 0.00781
Iteration: 652 - x_652 = [0. 0.], p_k = [-1.e-05 -1.e-05], α_k = 0.01562
Iteration: 653 - x_653 = [-0. 0.], p_k = [ 3.e-05 -1.e-05], α_k = 0.00781
Iteration: 654 - x_654 = [0. 0.], p_k = [-1.e-05 -1.e-05], α_k = 0.00781
Iteration: 655 - x_655 = [-0. 0.], p_k = [ 1.e-05 -1.e-05], α_k = 0.01562
Iteration: 656 - x_656 = [0. 0.], p_k = [-2.e-05 -1.e-05], α_k = 0.00781
Iteration: 657 - x_657 = [-0. 0.], p_k = [ 1.e-05 -1.e-05], α_k = 0.01562
Iteration: 658 - x_658 = [0. 0.], p_k = [-2.e-05 -1.e-05], α_k = 0.00781
Iteration: 659 - x_659 = [-0. 0.], p_k = [ 1.e-05 -1.e-05], α_k = 0.00781
Iteration: 660 - x_660 = [0. 0.], p_k = [-1.e-05 -1.e-05], α_k = 0.01562
Iteration: 661 - x_661 = [-0. 0.], p_k = [ 1.e-05 -1.e-05], α_k = 0.00781
Iteration: 662 - x_662 = [0. 0.], p_k = [-1.e-05 -1.e-05], α_k = 0.01562
Iteration: 663 - x_663 = [-0. 0.], p_k = [ 2.e-05 -1.e-05], α_k = 0.00781
Iteration: 664 - x_664 = [0. 0.], p_k = [-1.e-05 -1.e-05], α_k = 0.01562
Iteration: 665 - x_665 = [-0. 0.], p_k = [ 2.e-05 -1.e-05], α_k = 0.00781
Iteration: 666 - x_666 = [0. 0.], p_k = [-1.e-05 -1.e-05], α_k = 0.00781
Iteration: 667 - x_667 = [-0. 0.], p_k = [ 1.e-05 -1.e-05], α_k = 0.01562
Iteration: 668 - x_668 = [0. 0.], p_k = [-1.e-05 -1.e-05], α_k = 0.00781
Iteration: 669 - x_669 = [-0. 0.], p_k = [ 1.e-05 -1.e-05], α_k = 0.01562
Iteration: 670 - x_670 = [0. 0.], p_k = [-2.e-05 -1.e-05], α_k = 0.00781
Iteration: 671 - x_671 = [-0. 0.], p_k = [ 1.e-05 -1.e-05], α_k = 0.00781
Iteration: 672 - x_672 = [0. 0.], p_k = [-1.e-05 -1.e-05], α_k = 0.01562
Iteration: 673 - x_673 = [-0. 0.], p_k = [ 1.e-05 -1.e-05], α_k = 0.00781
Iteration: 674 - x_674 = [0. 0.], p_k = [-1.e-05 -1.e-05], α_k = 0.01562
Iteration: 675 - x_675 = [-0. 0.], p_k = [ 1.e-05 -1.e-05], α_k = 0.00781
Iteration: 676 - x_676 = [0. 0.], p_k = [-1.e-05 -1.e-05], α_k = 0.01562
Iteration: 677 - x_677 = [-0. 0.], p_k = [ 2.e-05 -1.e-05], α_k = 0.00781
Iteration: 678 - x_678 = [0. 0.], p_k = [-1.e-05 -1.e-05], α_k = 0.00781
Iteration: 679 - x_679 = [-0. 0.], p_k = [ 0.e+00 -1.e-05], α_k = 0.01562
Iteration: 680 - x_680 = [0. 0.], p_k = [-1.e-05 -1.e-05], α_k = 0.00781
Iteration: 681 - x_681 = [-0. 0.], p_k = [ 1.e-05 -0.e+00], α_k = 0.01562
Iteration: 682 - x_682 = [0. 0.], p_k = [-1.e-05 -0.e+00], α_k = 0.00781
Iteration: 683 - x_683 = [-0. 0.], p_k = [ 1.e-05 -0.e+00], α_k = 0.00781
Iteration: 684 - x_684 = [0. 0.], p_k = [-0. -0.], α_k = 0.01562
Iteration: 685 - x_685 = [-0. 0.], p_k = [ 1.e-05 -0.e+00], α_k = 0.00781
Iteration: 686 - x_686 = [0. 0.], p_k = [-0. -0.], α_k = 0.01562
Iteration: 687 - x_687 = [-0. 0.], p_k = [ 1.e-05 -0.e+00], α_k = 0.00781
Iteration: 688 - x_688 = [0. 0.], p_k = [-1.e-05 -0.e+00], α_k = 0.01562
Iteration: 689 - x_689 = [-0. 0.], p_k = [ 1.e-05 -0.e+00], α_k = 0.00781
Iteration: 690 - x_690 = [0. 0.], p_k = [-1.e-05 -0.e+00], α_k = 0.00781
Iteration: 691 - x_691 = [-0. 0.], p_k = [ 0. -0.], α_k = 0.01562
Iteration: 692 - x_692 = [0. 0.], p_k = [-1.e-05 -0.e+00], α_k = 0.00781
Iteration: 693 - x_693 = [-0. 0.], p_k = [ 0. -0.], α_k = 0.01562
Iteration: 694 - x_694 = [0. 0.], p_k = [-1.e-05 -0.e+00], α_k = 0.00781
Iteration: 695 - x_695 = [-0. 0.], p_k = [ 1.e-05 -0.e+00], α_k = 0.00781
Iteration: 696 - x_696 = [0. 0.], p_k = [-0. -0.], α_k = 0.01562
Iteration: 697 - x_697 = [-0. 0.], p_k = [ 1.e-05 -0.e+00], α_k = 0.00781
Iteration: 698 - x_698 = [0. 0.], p_k = [-0. -0.], α_k = 0.01562
Iteration: 699 - x_699 = [-0. 0.], p_k = [ 1.e-05 -0.e+00], α_k = 0.00781
Iteration: 700 - x_700 = [0. 0.], p_k = [-0. -0.], α_k = 0.01562
Iteration: 701 - x_701 = [-0. 0.], p_k = [ 1.e-05 -0.e+00], α_k = 0.00781
Iteration: 702 - x_702 = [0. 0.], p_k = [-1.e-05 -0.e+00], α_k = 0.00781
Iteration: 703 - x_703 = [-0. 0.], p_k = [ 0. -0.], α_k = 0.01562
Iteration: 704 - x_704 = [0. 0.], p_k = [-1.e-05 -0.e+00], α_k = 0.00781
Iteration: 705 - x_705 = [-0. 0.], p_k = [ 0. -0.], α_k = 0.01562
Iteration: 706 - x_706 = [0. 0.], p_k = [-1.e-05 -0.e+00], α_k = 0.00781
Iteration: 707 - x_707 = [-0. 0.], p_k = [ 0. -0.], α_k = 0.00781
Iteration: 708 - x_708 = [0. 0.], p_k = [-0. -0.], α_k = 0.01562
Iteration: 709 - x_709 = [-0. 0.], p_k = [ 0. -0.], α_k = 0.00781
Iteration: 710 - x_710 = [0. 0.], p_k = [-0. -0.], α_k = 0.01562
Iteration: 711 - x_711 = [-0. 0.], p_k = [ 1.e-05 -0.e+00], α_k = 0.00781
Iteration: 712 - x_712 = [0. 0.], p_k = [-0. -0.], α_k = 0.00781
Iteration: 713 - x_713 = [-0. 0.], p_k = [ 0. -0.], α_k = 0.01562
Iteration: 714 - x_714 = [0. 0.], p_k = [-0. -0.], α_k = 0.00781
Iteration: 715 - x_715 = [-0. 0.], p_k = [ 0. -0.], α_k = 0.01562
Iteration: 716 - x_716 = [0. 0.], p_k = [-0. -0.], α_k = 0.00781
Iteration: 717 - x_717 = [-0. 0.], p_k = [ 0. -0.], α_k = 0.01562
Iteration: 718 - x_718 = [0. 0.], p_k = [-1.e-05 -0.e+00], α_k = 0.00781
Iteration: 719 - x_719 = [-0. 0.], p_k = [ 0. -0.], α_k = 0.00781
Iteration: 720 - x_720 = [0. 0.], p_k = [-0. -0.], α_k = 0.01562
Iteration: 721 - x_721 = [-0. 0.], p_k = [ 0. -0.], α_k = 0.00781
Iteration: 722 - x_722 = [0. 0.], p_k = [-0. -0.], α_k = 0.01562
Iteration: 723 - x_723 = [-0. 0.], p_k = [ 0. -0.], α_k = 0.00781
Iteration: 724 - x_724 = [0. 0.], p_k = [-0. -0.], α_k = 0.00781
Iteration: 725 - x_725 = [-0. 0.], p_k = [ 0. -0.], α_k = 0.01562
Iteration: 726 - x_726 = [0. 0.], p_k = [-0. -0.], α_k = 0.00781
Iteration: 727 - x_727 = [-0. 0.], p_k = [ 0. -0.], α_k = 0.01562
Iteration: 728 - x_728 = [0. 0.], p_k = [-0. -0.], α_k = 0.00781
Iteration: 729 - x_729 = [-0. 0.], p_k = [ 0. -0.], α_k = 0.01562
Iteration: 730 - x_730 = [0. 0.], p_k = [-0. -0.], α_k = 0.00781
Iteration: 731 - x_731 = [-0. 0.], p_k = [ 0. -0.], α_k = 0.00781
Iteration: 732 - x_732 = [0. 0.], p_k = [-0. -0.], α_k = 0.01562
Iteration: 733 - x_733 = [-0. 0.], p_k = [ 0. -0.], α_k = 0.00781
Iteration: 734 - x_734 = [0. 0.], p_k = [-0. -0.], α_k = 0.01562
Iteration: 735 - x_735 = [-0. 0.], p_k = [ 0. -0.], α_k = 0.00781
Iteration: 736 - x_736 = [0. 0.], p_k = [-0. -0.], α_k = 0.00781
Iteration: 737 - x_737 = [-0. 0.], p_k = [ 0. -0.], α_k = 0.01562
Iteration: 738 - x_738 = [0. 0.], p_k = [-0. -0.], α_k = 0.00781
Iteration: 739 - x_739 = [-0. 0.], p_k = [ 0. -0.], α_k = 0.01562
Iteration: 740 - x_740 = [0. 0.], p_k = [-0. -0.], α_k = 0.00781
Iteration: 741 - x_741 = [-0. 0.], p_k = [ 0. -0.], α_k = 0.01562
Iteration: 742 - x_742 = [0. 0.], p_k = [-0. -0.], α_k = 0.00781
Iteration: 743 - x_743 = [-0. 0.], p_k = [ 0. -0.], α_k = 0.00781
Iteration: 744 - x_744 = [0. 0.], p_k = [-0. -0.], α_k = 0.01562
Iteration: 745 - x_745 = [-0. 0.], p_k = [ 0. -0.], α_k = 0.00781
Iteration: 746 - x_746 = [0. 0.], p_k = [-0. -0.], α_k = 0.01562
Iteration: 747 - x_747 = [-0. 0.], p_k = [ 0. -0.], α_k = 0.00781
Iteration: 748 - x_748 = [0. 0.], p_k = [-0. -0.], α_k = 0.00781
Iteration: 749 - x_749 = [-0. 0.], p_k = [ 0. -0.], α_k = 0.01562
Iteration: 750 - x_750 = [0. 0.], p_k = [-0. -0.], α_k = 0.00781
Iteration: 751 - x_751 = [-0. 0.], p_k = [ 0. -0.], α_k = 0.01562
Iteration: 752 - x_752 = [0. 0.], p_k = [-0. -0.], α_k = 0.00781
Iteration: 753 - x_753 = [-0. 0.], p_k = [ 0. -0.], α_k = 0.01562
Iteration: 754 - x_754 = [0. 0.], p_k = [-0. -0.], α_k = 0.00781
Iteration: 755 - x_755 = [-0. 0.], p_k = [ 0. -0.], α_k = 0.00781
Iteration: 756 - x_756 = [0. 0.], p_k = [-0. -0.], α_k = 0.01562
Iteration: 757 - x_757 = [-0. 0.], p_k = [ 0. -0.], α_k = 0.00781
Iteration: 758 - x_758 = [0. 0.], p_k = [-0. -0.], α_k = 0.01562
Iteration: 759 - x_759 = [-0. 0.], p_k = [ 0. -0.], α_k = 0.00781
Iteration: 760 - x_760 = [0. 0.], p_k = [-0. -0.], α_k = 0.00781
Series diverged.
time: 532 ms
(b) Do the same with Newton’s Method.
def newton_raphson_opt(
f, f_prime, hessian, x_0, ε=1e-15, steplength_algo=simple_steplength
):
"""This method here is exactly the same as the
Newton method for root finding except that f is
the function we're trying to find the optimum point
for - using the newton raphson root finding but for
the derivative of f, and this method is applicable to
higher dimensions
"""
k, x_k = 0, x_0
while True:
# 1. Test for Convergence
if np.allclose(f_prime(x=x_k), 0, rtol=ε):
return x_k
# 2. Compute a search direction
p_k = -np.linalg.inv(hessian(x=x_k)) @ f_prime(x=x_k)
# 3. Compute a steplength
α_k = steplength_algo(f=f, f_prime=f_prime, x_k=x_k, p_k=p_k, μ=1e-4)
print(
f"Iteration: {k} - x_{k} = {np.round(x_k, 5)}, p_k = {np.round(p_k, 5)}, α_k = {np.round(α_k, 5)}, hessian = {np.round(hessian(x=x_k), 5)}"
)
# 4. Update the iterate and return to Step 1
k += 1
x_k += α_k * p_k
# Check for divergence
if np.allclose(x_k, x_k + α_k * p_k) and k > 1:
print("Series diverged.")
break
time: 2.4 ms
c = 2
print(f"Newton's Method with c={c}:")
print("=" * 30)
newton_raphson_opt(
f=functools.partial(f, c=c),
f_prime=functools.partial(f_prime, c=c),
hessian=functools.partial(hessian, c=c),
x_0=np.array([10.0, 10.0]),
ε=1e-15,
)
Newton's Method with c=2:
==============================
Iteration: 0 - x_0 = [10. 10.], p_k = [-10. -10.], α_k = 1, hessian = [[4 0]
[0 2]]
array([0., 0.])
time: 4.5 ms
c = 10
print(f"Newton's Method with c={c}:")
print("=" * 30)
newton_raphson_opt(
f=functools.partial(f, c=c),
f_prime=functools.partial(f_prime, c=c),
hessian=functools.partial(hessian, c=c),
x_0=np.array([10.0, 10.0]),
ε=1e-15,
)
Newton's Method with c=10:
==============================
Iteration: 0 - x_0 = [10. 10.], p_k = [-10. -10.], α_k = 1, hessian = [[20 0]
[ 0 2]]
array([0., 0.])
time: 4.6 ms
c = 100
print(f"Newton's Method with c={c}:")
print("=" * 30)
newton_raphson_opt(
f=functools.partial(f, c=c),
f_prime=functools.partial(f_prime, c=c),
hessian=functools.partial(hessian, c=c),
x_0=np.array([10.0, 10.0]),
ε=1e-15,
)
Newton's Method with c=100:
==============================
Iteration: 0 - x_0 = [10. 10.], p_k = [-10. -10.], α_k = 1, hessian = [[200 0]
[ 0 2]]
array([0., 0.])
time: 4.58 ms
Since the Hessian of the function is positive definite for \(c > 0\), Newton’s method search direction \(p_k\) jumps directly to the minimum of the function, and hence, with all 3 \(c\)’s, Newton’s Method only takes 1 iteration.
Extra Questions¶
1.¶
Show that the univariate function \(f(x) = x^{4/3}\) has a unique minimizer at \(x = 0\) but that for any nonzero initial point, the Newton sequence for minimizing \(f\) diverges.
f = lambda x: x ** (4 / 3)
x = np.linspace(0, 100, 1000)
plt.title("$f(x) = x^{4/3}$")
plt.plot(x, f(x))
plt.grid(True)
plt.show()
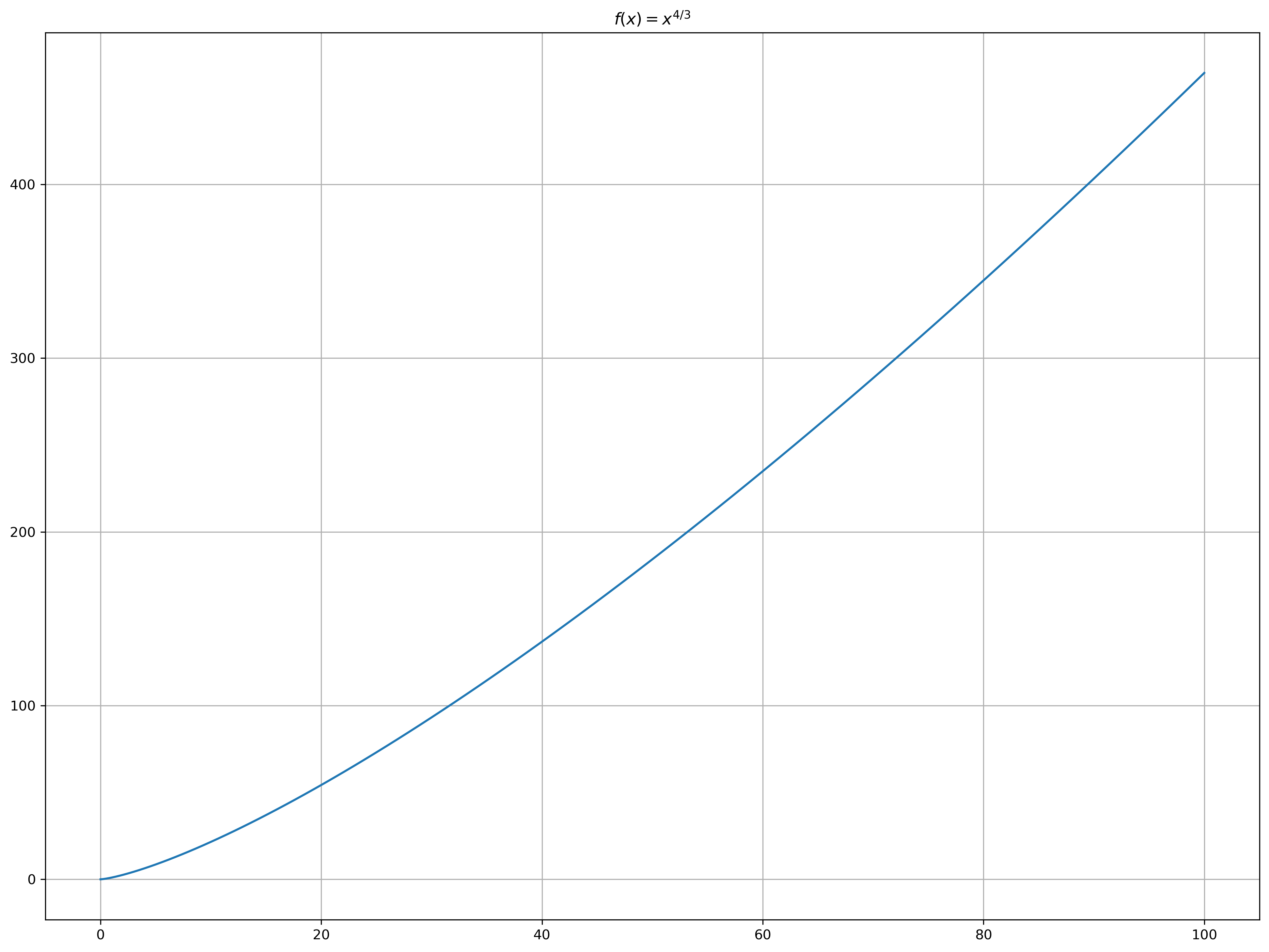
time: 1.76 s
At the stationary point, \(f^\prime (x) = 0\), meaning that \(x=0\) is the stationary point. \(f^\prime (x>0) > 0\), while \(f^\prime (x<0) < 0\), meaning that \(x=0\) is a unique minimizer. \(\blacksquare\)
Proof by Contradiction:
Assuming unit steplength \(\alpha_k = 1\), and suppose \(x_0 \not= 0\) (\(x_0 > 0\) actually, since \(f(x)\) is undefined for \(x < 0\)),
Newton’s Method coordinate update step:
Assuming \(\underset{k \rightarrow \infty}{\lim}x_k = L\) (we converge to an optimal value),
If \(L \not= 0\), the equation above is contradicting since LHS \(\rightarrow 0\), RHS \(\rightarrow -\infty\).
Hence, Newton’s Method’s coordinate update step is undefined for any value of \(x_k\), sequence diverges for any nonzero initial point. (When \(x_0 = 0\), Newton’s Method outputs the optimal \(x = x_0\) because test of convergence is before the update step). \(\blacksquare\)
2.¶
Compute the first two iterates of the Newton Method (with unit step) starting with \(x^0 = (0, 0)\) for minimizing the function: \(f(x_1, x_2) = 2x^4_1 + x^2_2 − 4x_1x_2 + 5x_2\). Do the same with the steepest descent method with exact line search.
def line_search(f, f_prime, x_k, p_k, μ=1e-4, η=1):
"""α = argmin_α f(xk + αpk), η=1 for exact, η small for accurate line search"""
# 1. Set α=1.
α = 1
while True:
# 2. Wolfe conditions:
# If f(xk+αpk) ≤ f(xk)+μαgkpk, and |g(x+αpk).Tpk| ≤ η|g(xk).Tpk|, set αk=α and stop.
if f(x_k + α * p_k) <= f(x_k) + μ * α * f_prime(x_k).T @ p_k and np.abs(
f_prime(x_k + α * p_k).T @ p_k
) <= η * np.abs(f_prime(x_k).T @ p_k):
return α
else:
# 3. Set α=α/2 and go to Step2.
α /= 2
time: 1.38 ms
Gradient Vector:
Hessian:
f = lambda x: 2 * (x[0] ** 4) + x[1] ** 2 - 4 * x[0] * x[1] + 5 * x[1]
f_prime = lambda x: np.array([8 * (x[0] ** 3) - 4 * x[1], 2 * x[1] - 4 * x[0] + 5])
hessian = lambda x: np.array([[24 * (x[0] ** 2), -4], [-4, 2]])
time: 1.36 ms
Newton’s Method with Exact Line Search (\(\eta = 1\) in Wolfe Conditions)
newton_raphson_opt(
f=f,
f_prime=f_prime,
hessian=hessian,
x_0=np.array([0.0, 0.0]),
steplength_algo=line_search,
)
Iteration: 0 - x_0 = [0. 0.], p_k = [1.25 0. ], α_k = 0.0, hessian = [[ 0. -4.]
[-4. 2.]]
Iteration: 1 - x_1 = [0. 0.], p_k = [1.25 0. ], α_k = 0.0, hessian = [[ 0. -4.]
[-4. 2.]]
Series diverged.
time: 15.9 ms
Steepest Descent with Exact Line Search (\(\eta = 1\) in Wolfe Conditions)
steepest_descent(
f=f, f_prime=f_prime, x_0=np.array([0.0, 0.0]), steplength_algo=line_search
)
Iteration: 0 - x_0 = [0. 0.], p_k = [-0. -5.], α_k = 0.5
Iteration: 1 - x_1 = [ 0. -2.5], p_k = [-10. -0.], α_k = 0.125
Iteration: 2 - x_2 = [-1.25 -2.5 ], p_k = [ 5.625 -5. ], α_k = 0.0625
Iteration: 3 - x_3 = [-0.89844 -2.8125 ], p_k = [-5.44832 -2.96875], α_k = 0.0625
Iteration: 4 - x_4 = [-1.23896 -2.99805], p_k = [ 3.22237 -3.95974], α_k = 0.0625
Iteration: 5 - x_5 = [-1.03756 -3.24553], p_k = [-4.04641 -2.65918], α_k = 0.0625
Iteration: 6 - x_6 = [-1.29046 -3.41173], p_k = [ 3.54499 -3.33838], α_k = 0.0625
Iteration: 7 - x_7 = [-1.0689 -3.62038], p_k = [-4.7114 -2.03484], α_k = 0.0625
Iteration: 8 - x_8 = [-1.36336 -3.74756], p_k = [ 5.283 -2.95833], α_k = 0.03125
Iteration: 9 - x_9 = [-1.19827 -3.84 ], p_k = [-1.5958 -2.11306], α_k = 0.125
Iteration: 10 - x_10 = [-1.39774 -4.10414], p_k = [ 5.42945 -2.3827 ], α_k = 0.03125
Iteration: 11 - x_11 = [-1.22807 -4.1786 ], p_k = [-1.89732 -1.5551 ], α_k = 0.0625
Iteration: 12 - x_12 = [-1.34666 -4.27579], p_k = [ 2.4339 -1.83504], α_k = 0.0625
Iteration: 13 - x_13 = [-1.19454 -4.39048], p_k = [-3.92589 -0.99719], α_k = 0.03125
Iteration: 14 - x_14 = [-1.31722 -4.42164], p_k = [ 0.59718 -1.4256 ], α_k = 0.125
Iteration: 15 - x_15 = [-1.24257 -4.59984], p_k = [-3.05123 -0.77061], α_k = 0.03125
Iteration: 16 - x_16 = [-1.33792 -4.62392], p_k = [ 0.66381 -1.10385], α_k = 0.125
Iteration: 17 - x_17 = [-1.25495 -4.7619 ], p_k = [-3.23634 -0.49598], α_k = 0.03125
Iteration: 18 - x_18 = [-1.35608 -4.7774 ], p_k = [ 0.84067 -0.86953], α_k = 0.0625
Iteration: 19 - x_19 = [-1.30354 -4.83175], p_k = [-1.60697 -0.55067], α_k = 0.03125
Iteration: 20 - x_20 = [-1.35376 -4.84896], p_k = [ 0.45205 -0.71712], α_k = 0.0625
Iteration: 21 - x_21 = [-1.32551 -4.89378], p_k = [-0.94416 -0.51447], α_k = 0.0625
Iteration: 22 - x_22 = [-1.38452 -4.92593], p_k = [ 1.52793 -0.6862 ], α_k = 0.03125
Iteration: 23 - x_23 = [-1.33677 -4.94738], p_k = [-0.67961 -0.45232], α_k = 0.0625
Iteration: 24 - x_24 = [-1.37924 -4.97565], p_k = [ 1.08745 -0.56568], α_k = 0.03125
Iteration: 25 - x_25 = [-1.34526 -4.99332], p_k = [-0.49685 -0.3944 ], α_k = 0.0625
Iteration: 26 - x_26 = [-1.37631 -5.01797], p_k = [ 0.78467 -0.46931], α_k = 0.03125
Iteration: 27 - x_27 = [-1.35179 -5.03264], p_k = [-0.36901 -0.3419 ], α_k = 0.0625
Iteration: 28 - x_28 = [-1.37486 -5.05401], p_k = [ 0.57434 -0.39141], α_k = 0.03125
Iteration: 29 - x_29 = [-1.35691 -5.06624], p_k = [-0.27823 -0.29516], α_k = 0.0625
Iteration: 30 - x_30 = [-1.3743 -5.08469], p_k = [ 0.42629 -0.32782], α_k = 0.03125
Iteration: 31 - x_31 = [-1.36098 -5.09493], p_k = [-0.2127 -0.25404], α_k = 0.125
Iteration: 32 - x_32 = [-1.38756 -5.12669], p_k = [ 0.86545 -0.29688], α_k = 0.03125
Iteration: 33 - x_33 = [-1.36052 -5.13596], p_k = [-0.39717 -0.17015], α_k = 0.03125
Iteration: 34 - x_34 = [-1.37293 -5.14128], p_k = [ 0.13798 -0.20916], α_k = 0.0625
Iteration: 35 - x_35 = [-1.36431 -5.15435], p_k = [-0.30199 -0.14852], α_k = 0.03125
Iteration: 36 - x_36 = [-1.37374 -5.15899], p_k = [ 0.10395 -0.17699], α_k = 0.0625
Iteration: 37 - x_37 = [-1.36725 -5.17006], p_k = [-0.23316 -0.12888], α_k = 0.0625
Iteration: 38 - x_38 = [-1.38182 -5.17811], p_k = [ 0.3954 -0.17106], α_k = 0.03125
Iteration: 39 - x_39 = [-1.36946 -5.18346], p_k = [-0.18717 -0.11094], α_k = 0.0625
Iteration: 40 - x_40 = [-1.38116 -5.19039], p_k = [ 0.31615 -0.14387], α_k = 0.03125
Iteration: 41 - x_41 = [-1.37128 -5.19489], p_k = [-0.15092 -0.09536], α_k = 0.0625
Iteration: 42 - x_42 = [-1.38071 -5.20085], p_k = [ 0.25387 -0.12117], α_k = 0.03125
Iteration: 43 - x_43 = [-1.37278 -5.20463], p_k = [-0.12217 -0.08186], α_k = 0.0625
Iteration: 44 - x_44 = [-1.38042 -5.20975], p_k = [ 0.20464 -0.10217], α_k = 0.03125
Iteration: 45 - x_45 = [-1.37402 -5.21294], p_k = [-0.09924 -0.0702 ], α_k = 0.0625
Iteration: 46 - x_46 = [-1.38022 -5.21733], p_k = [ 0.16552 -0.08624], α_k = 0.03125
Iteration: 47 - x_47 = [-1.37505 -5.22002], p_k = [-0.08087 -0.06016], α_k = 0.0625
Iteration: 48 - x_48 = [-1.38011 -5.22378], p_k = [ 0.13429 -0.07286], α_k = 0.03125
Iteration: 49 - x_49 = [-1.37591 -5.22606], p_k = [-0.06607 -0.05152], α_k = 0.0625
Iteration: 50 - x_50 = [-1.38004 -5.22928], p_k = [ 0.10923 -0.06159], α_k = 0.03125
Iteration: 51 - x_51 = [-1.37663 -5.23121], p_k = [-0.05411 -0.04409], α_k = 0.0625
Iteration: 52 - x_52 = [-1.38001 -5.23396], p_k = [ 0.08905 -0.05211], α_k = 0.03125
Iteration: 53 - x_53 = [-1.37722 -5.23559], p_k = [-0.0444 -0.03772], α_k = 0.0625
Iteration: 54 - x_54 = [-1.38 -5.23795], p_k = [ 0.07275 -0.0441 ], α_k = 0.03125
Iteration: 55 - x_55 = [-1.37773 -5.23932], p_k = [-0.0365 -0.03225], α_k = 0.0625
Iteration: 56 - x_56 = [-1.38001 -5.24134], p_k = [ 0.05953 -0.03735], α_k = 0.03125
Iteration: 57 - x_57 = [-1.37815 -5.24251], p_k = [-0.03005 -0.02757], α_k = 0.0625
Iteration: 58 - x_58 = [-1.38002 -5.24423], p_k = [ 0.04879 -0.03164], α_k = 0.03125
Iteration: 59 - x_59 = [-1.3785 -5.24522], p_k = [-0.02478 -0.02356], α_k = 0.0625
Iteration: 60 - x_60 = [-1.38005 -5.24669], p_k = [ 0.04003 -0.02681], α_k = 0.03125
Iteration: 61 - x_61 = [-1.3788 -5.24753], p_k = [-0.02045 -0.02013], α_k = 0.0625
Iteration: 62 - x_62 = [-1.38008 -5.24879], p_k = [ 0.03289 -0.02273], α_k = 0.03125
Iteration: 63 - x_63 = [-1.37905 -5.2495 ], p_k = [-0.0169 -0.0172], α_k = 0.0625
Iteration: 64 - x_64 = [-1.3801 -5.25057], p_k = [ 0.02704 -0.01927], α_k = 0.03125
Iteration: 65 - x_65 = [-1.37926 -5.25118], p_k = [-0.01397 -0.01469], α_k = 0.0625
Iteration: 66 - x_66 = [-1.38013 -5.25209], p_k = [ 0.02225 -0.01634], α_k = 0.03125
Iteration: 67 - x_67 = [-1.37944 -5.2526 ], p_k = [-0.01156 -0.01254], α_k = 0.0625
Iteration: 68 - x_68 = [-1.38016 -5.25339], p_k = [ 0.01833 -0.01386], α_k = 0.03125
Iteration: 69 - x_69 = [-1.37959 -5.25382], p_k = [-0.00958 -0.01071], α_k = 0.0625
Iteration: 70 - x_70 = [-1.38019 -5.25449], p_k = [ 0.0151 -0.01176], α_k = 0.03125
Iteration: 71 - x_71 = [-1.37971 -5.25486], p_k = [-0.00794 -0.00914], α_k = 0.0625
Iteration: 72 - x_72 = [-1.38021 -5.25543], p_k = [ 0.01245 -0.00998], α_k = 0.03125
Iteration: 73 - x_73 = [-1.37982 -5.25574], p_k = [-0.00658 -0.0078 ], α_k = 0.0625
Iteration: 74 - x_74 = [-1.38023 -5.25623], p_k = [ 0.01027 -0.00847], α_k = 0.0625
Iteration: 75 - x_75 = [-1.37959 -5.25676], p_k = [-0.02117 -0.00485], α_k = 0.03125
Iteration: 76 - x_76 = [-1.38025 -5.25691], p_k = [ 0.00846 -0.00719], α_k = 0.0625
Iteration: 77 - x_77 = [-1.37972 -5.25736], p_k = [-0.0175 -0.00418], α_k = 0.03125
Iteration: 78 - x_78 = [-1.38027 -5.25749], p_k = [ 0.00697 -0.0061 ], α_k = 0.0625
Iteration: 79 - x_79 = [-1.37983 -5.25787], p_k = [-0.01448 -0.0036 ], α_k = 0.03125
Iteration: 80 - x_80 = [-1.38029 -5.25798], p_k = [ 0.00575 -0.00518], α_k = 0.0625
Iteration: 81 - x_81 = [-1.37993 -5.25831], p_k = [-0.01198 -0.0031 ], α_k = 0.03125
Iteration: 82 - x_82 = [-1.3803 -5.2584], p_k = [ 0.00475 -0.0044 ], α_k = 0.0625
Iteration: 83 - x_83 = [-1.38 -5.25868], p_k = [-0.00991 -0.00266], α_k = 0.03125
Iteration: 84 - x_84 = [-1.38031 -5.25876], p_k = [ 0.00392 -0.00374], α_k = 0.0625
Iteration: 85 - x_85 = [-1.38007 -5.259 ], p_k = [-0.00821 -0.00229], α_k = 0.03125
Iteration: 86 - x_86 = [-1.38033 -5.25907], p_k = [ 0.00323 -0.00317], α_k = 0.0625
Iteration: 87 - x_87 = [-1.38012 -5.25926], p_k = [-0.0068 -0.00197], α_k = 0.03125
Iteration: 88 - x_88 = [-1.38034 -5.25933], p_k = [ 0.00267 -0.00269], α_k = 0.0625
Iteration: 89 - x_89 = [-1.38017 -5.25949], p_k = [-0.00563 -0.00169], α_k = 0.03125
Iteration: 90 - x_90 = [-1.38035 -5.25955], p_k = [ 0.0022 -0.00229], α_k = 0.0625
Iteration: 91 - x_91 = [-1.38021 -5.25969], p_k = [-0.00467 -0.00145], α_k = 0.03125
Iteration: 92 - x_92 = [-1.38035 -5.25974], p_k = [ 0.00182 -0.00194], α_k = 0.0625
Iteration: 93 - x_93 = [-1.38024 -5.25986], p_k = [-0.00387 -0.00125], α_k = 0.03125
Iteration: 94 - x_94 = [-1.38036 -5.2599 ], p_k = [ 0.0015 -0.00165], α_k = 0.0625
Iteration: 95 - x_95 = [-1.38027 -5.26 ], p_k = [-0.0032 -0.00107], α_k = 0.03125
Iteration: 96 - x_96 = [-1.38037 -5.26003], p_k = [ 0.00124 -0.0014 ], α_k = 0.0625
Iteration: 97 - x_97 = [-1.38029 -5.26012], p_k = [-0.00266 -0.00092], α_k = 0.03125
Iteration: 98 - x_98 = [-1.38037 -5.26015], p_k = [ 0.00102 -0.00119], α_k = 0.0625
Iteration: 99 - x_99 = [-1.38031 -5.26022], p_k = [-0.0022 -0.00079], α_k = 0.03125
Iteration: 100 - x_100 = [-1.38038 -5.26025], p_k = [ 0.00085 -0.00101], α_k = 0.0625
Iteration: 101 - x_101 = [-1.38032 -5.26031], p_k = [-0.00183 -0.00067], α_k = 0.03125
Iteration: 102 - x_102 = [-1.38038 -5.26033], p_k = [ 0.0007 -0.00086], α_k = 0.0625
Iteration: 103 - x_103 = [-1.38034 -5.26039], p_k = [-0.00151 -0.00058], α_k = 0.03125
Iteration: 104 - x_104 = [-1.38039 -5.2604 ], p_k = [ 0.00058 -0.00073], α_k = 0.0625
Iteration: 105 - x_105 = [-1.38035 -5.26045], p_k = [-0.00126 -0.0005 ], α_k = 0.03125
Iteration: 106 - x_106 = [-1.38039 -5.26047], p_k = [ 0.00048 -0.00062], α_k = 0.0625
Iteration: 107 - x_107 = [-1.38036 -5.26051], p_k = [-0.00104 -0.00042], α_k = 0.03125
Iteration: 108 - x_108 = [-1.38039 -5.26052], p_k = [ 0.00039 -0.00053], α_k = 0.0625
Iteration: 109 - x_109 = [-1.38037 -5.26055], p_k = [-0.00086 -0.00036], α_k = 0.03125
Iteration: 110 - x_110 = [-1.38039 -5.26056], p_k = [ 0.00033 -0.00045], α_k = 0.0625
Iteration: 111 - x_111 = [-1.38037 -5.26059], p_k = [-0.00072 -0.00031], α_k = 0.03125
Iteration: 112 - x_112 = [-1.3804 -5.2606], p_k = [ 0.00027 -0.00038], α_k = 0.0625
Iteration: 113 - x_113 = [-1.38038 -5.26062], p_k = [-0.00059 -0.00027], α_k = 0.03125
Iteration: 114 - x_114 = [-1.3804 -5.26063], p_k = [ 0.00022 -0.00032], α_k = 0.0625
Iteration: 115 - x_115 = [-1.38038 -5.26065], p_k = [-0.00049 -0.00023], α_k = 0.03125
Iteration: 116 - x_116 = [-1.3804 -5.26066], p_k = [ 0.00018 -0.00028], α_k = 0.0625
Series diverged.
time: 76.4 ms
We observe that Steepest Descent takes quite a while for iterations before realizing that the function is unoptimizable.
3.¶
Compute and solve the equation of the linear regression line corresponding to the univariate input-output data \((x, y)\) given by \(\{(−2, 12),(−1, 11),(0, 8),(1, 5),(2, 2),(3, −3)\}\). Plot these points and the computed line in the \((x, y)\)-plane.
Least-Squares / Linear Regression Problem:
Gradient Vector First-order Optimality Condition:
Hessian Second Order Sufficient Condition:
The Hessian is positive semi-definite proof:
For any vector \(z: z \in \mathbb{R}^n\),
As long as \(X^\top X\) is invertible (by Invertible Matrix Theorem, non-zero determinant, 0 not an eigenvalue), together with Hessian being at least positive semi-definite, Hessian will be positive definite and the stationary point we found from first-order optimality conditions will yield a global minimizer since Hessian is positive definite for any \(\beta\) and function is strictly convex.
X, y = (
np.array([-2, -1, 0, 1, 2, 3]),
np.array([12, 11, 8, 5, 2, -3]),
)
X = np.concatenate([np.ones((X.shape[0], 1)), np.expand_dims(X, axis=1)], axis=1)
β_hat = np.linalg.inv(X.T @ X) @ X.T @ y
x = np.linspace(X[:, 1].min(), X[:, 1].max(), 1000)
plt.scatter(X[:, 1], y, label="data points")
plt.plot(
x,
np.concatenate([np.ones((x.shape[0], 1)), np.expand_dims(x, axis=1)], axis=1)
@ β_hat,
label=f"OLS line: y = {np.round(β_hat[1], 2)}x + {np.round(β_hat[0], 2)}",
)
plt.grid(True)
plt.legend()
plt.title("Fitted Linear Regression OLS solution")
plt.show()
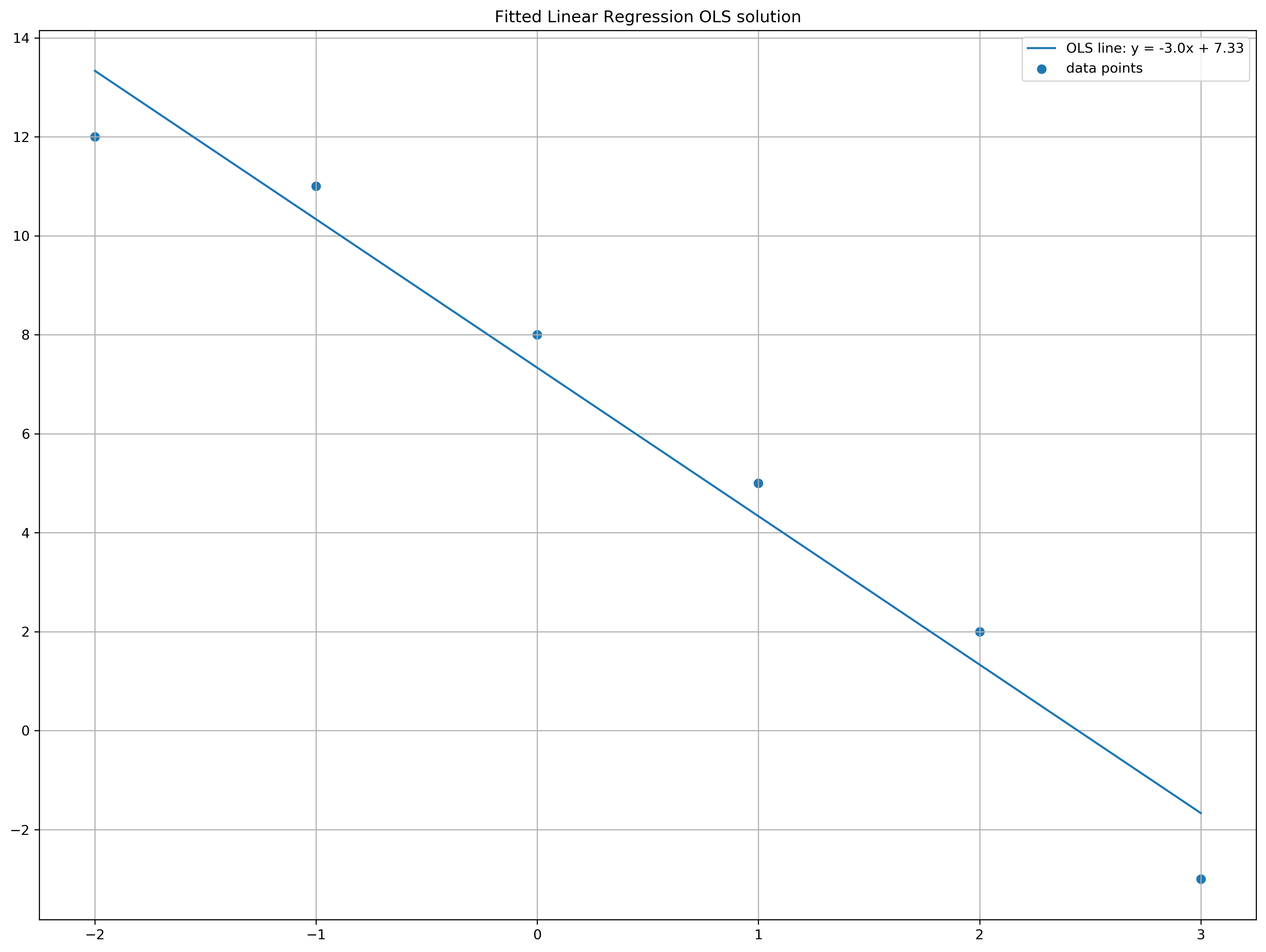
time: 1.69 s
4.¶
Suppose that the (univariate) variable \(y\) is known to be a quadratic function of the variable \(x\); that is,
where the coefficients \(a, b, c\) are obtained by conducting an experiment in which values \(y_1, \cdots, y_n\) of the variable \(y\) are measured for corresponding values \(x_1, \cdots, x_n\) of the variable \(x\). Find the best least-squares fit of the quadratic polynomial using the data:
Plot these points and the computed quadratic curve in the \((x, y)\)-plane.
data = [(-2, -5), (-1, -1), (0, 4), (1, 7), (2, 6), (3, 5), (4, -1)]
X, y = np.array(list(zip(*data)))
X = np.concatenate(
[
np.ones((X.shape[0], 1)),
np.expand_dims(X, axis=1),
np.expand_dims(X ** 2, axis=1),
],
axis=1,
)
β_hat = np.linalg.inv(X.T @ X) @ X.T @ y
x = np.linspace(X[:, 1].min(), X[:, 1].max(), 1000)
plt.scatter(X[:, 1], y, label="data points")
plt.plot(
x,
np.concatenate(
[
np.ones((x.shape[0], 1)),
np.expand_dims(x, axis=1),
np.expand_dims(x ** 2, axis=1),
],
axis=1,
)
@ β_hat,
label=f"OLS line: y = {np.round(β_hat[2], 2)}x^2 + {np.round(β_hat[1], 2)}x + {np.round(β_hat[0], 2)}",
)
plt.grid(True)
plt.legend()
plt.title("Fitted Linear Regression OLS solution with constant, $x$, and $x^2$ terms")
plt.show()
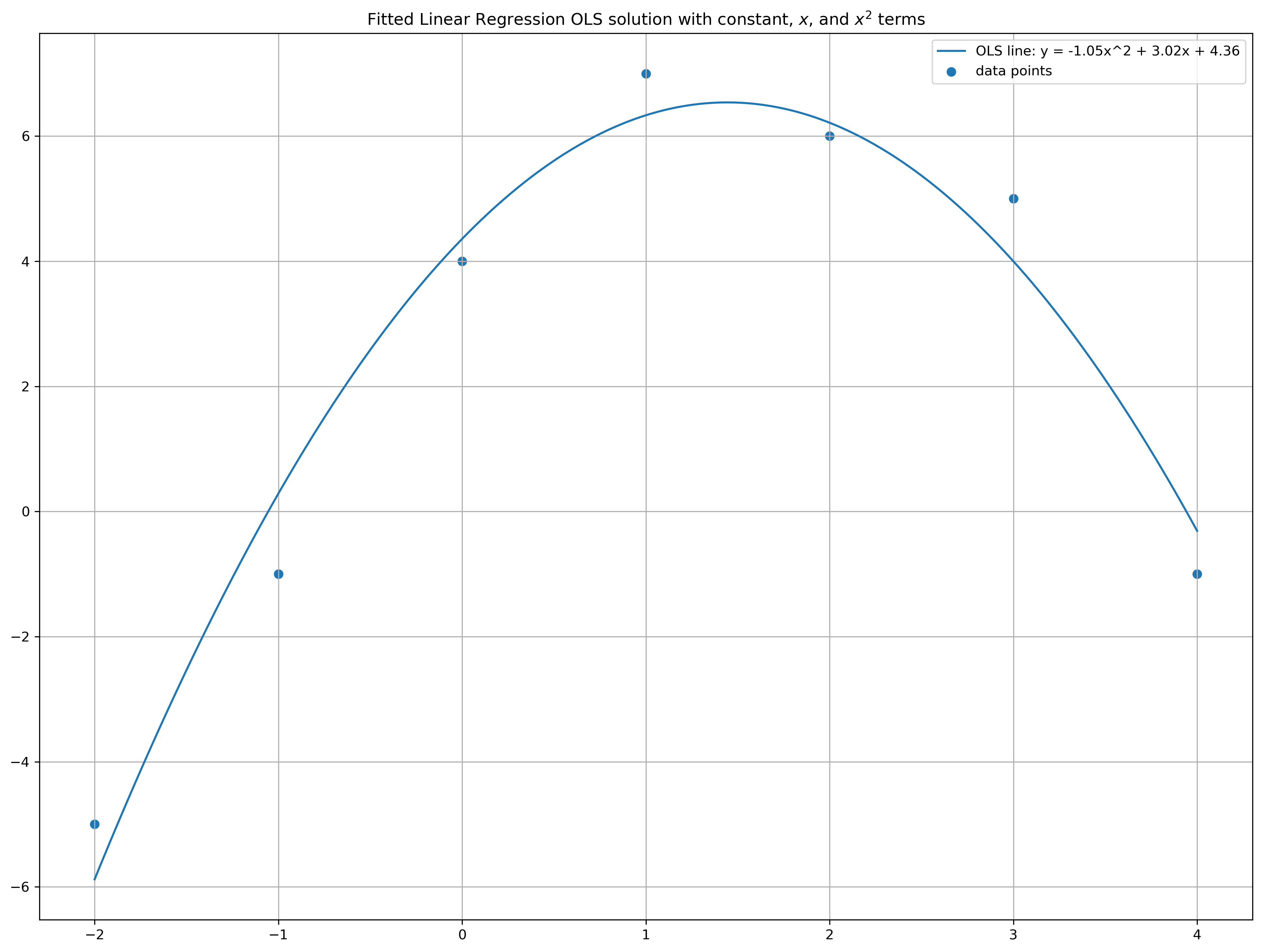
time: 1.79 s
5¶
Show that the matrix
is positive semidefinite but not positive definite for all values of the scalar \(x\).
Proof:
Since \(x\) is a scalar, divide 1st row by \(x^2\), and 2nd row by \(x\):
Subtract 1st row from 2nd and last row:
Any triangular / diagonal matrix’s diagonal entries are its eigenvalues: Hence, our Eigenvalues \(\lambda = x^2, 0, 0\). Since our eigenvalues are \(\geq 0\), but not \(> 0\), we have a positive semidefinite matrix, but not a positive definite matrix. \(\blacksquare\)